Pesquisadores do Instituto Italiano de Tecnologia apresentaram um protótipo de robô de três pernas que
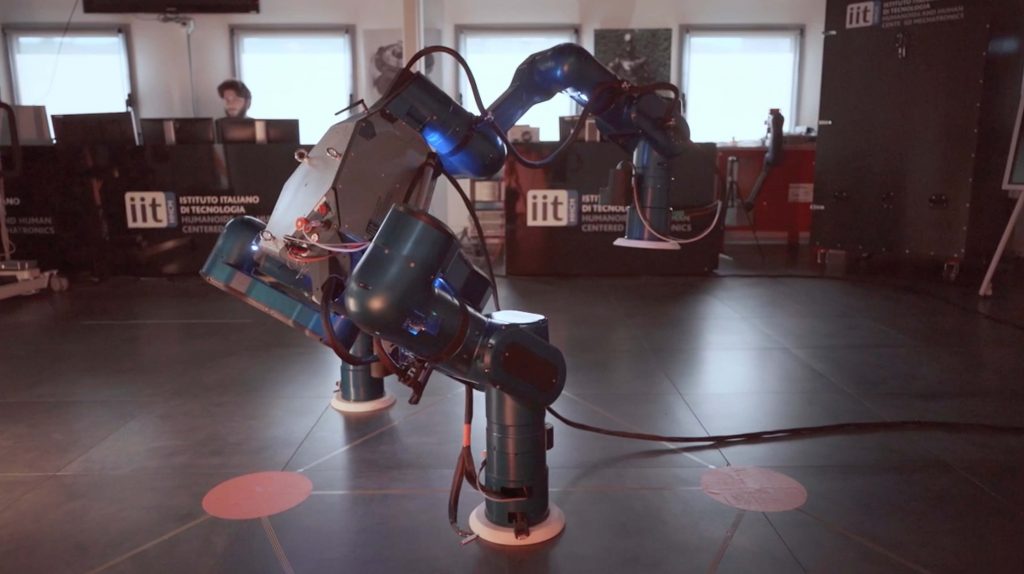
A plataforma robótica MARM consiste emcorpo central, três membros e um dispositivo de encaixe especial. Este último é usado para carregar o dispositivo e trocar dados. Ao criar um robô, os cientistas previram a possibilidade de trabalhar tanto na presença da gravidade quanto na microgravidade.
Robô MARM. Vídeo: IIT
O robô MARM pode usar três membros paramovimento agarrando interconexões padrão nas superfícies da estação e rastejando sobre elas. Ele também pode montar e posicionar vários componentes do dispositivo, como mover e instalar as placas hexagonais modulares de 1,2 m de largura usadas na ISS e manipular plug-ins orbitais.

Robô MARM. Fotos: IIT
Configuração de Três Membros - Básicoa diferença entre o novo robô e os desenvolvimentos anteriores. Isso, segundo os engenheiros, proporciona maior agilidade na operação do aparelho. Por exemplo, ele pode usar duas "mãos" para trabalhar, segurando-se na superfície com a ajuda da outra.
Pesquisadores sugerem o uso do MARM parapegue as mercadorias do armazém, mova-as para o lugar certo, colete-as e coloque-as. O protótipo será testado em microgravidade com esse cenário em mente, após o que uma versão funcional será criada para ser enviada à ISS.
Consulte Mais informação:
Cientistas da zona do permafrost: como eles desenvolvem roupas inteligentes e uma vacina contra o câncer
Dois planetas foram encontrados não muito longe da Terra. Talvez sejam habitados
Cientistas descobrem quem se beneficiou com a morte dos dinossauros