Engenheiros da École Polytechnique Fédérale de Lausanne desenvolveram um método que permite a um robô
Pouso de ornitóptero. Vídeo: EPFL
Pousar um pássaro em um galho parece ser uma das coisas maisprocessos naturais. Mas, na verdade, requer um equilíbrio extremamente preciso entre tempo, força de impacto, velocidade e precisão de movimento, observam os autores do desenvolvimento. Não surpreendentemente, até agora, os engenheiros não conseguiram reproduzir esses movimentos em robôs.
 Sistema de pouso de ornitópteros. Imagem: Raphael Zufferey et al., Nature Communications
Sistema de pouso de ornitópteros. Imagem: Raphael Zufferey et al., Nature Communications
Pesquisadores resolveram o problema do equilíbrio precisoequipar o ornitóptero com computador de bordo e sistema de navegação. Ele usa fontes externas para capturar movimento e determinar a posição do dispositivo. O apêndice da perna em forma de garra do ornitóptero foi calibrado com precisão para compensar as vibrações para cima e para baixo durante o vôo, enquanto o drone tentava se agarrar a um poleiro.

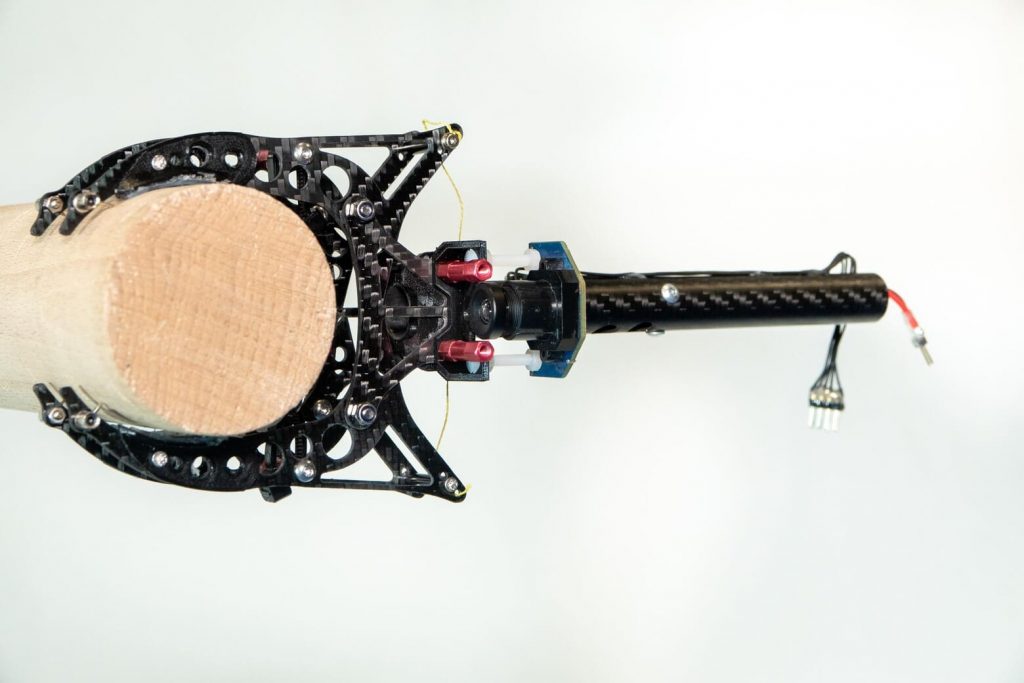
Montagem de ornitóptero. Imagem: EPFL
A própria garra foi projetada de tal forma queabsorvem o impulso do movimento do robô no momento do impacto e fecham de forma rápida e segura para suportar seu peso. Uma vez no poleiro, o robô permanece no poleiro sem gastar energia. Os pesquisadores estão atualmente realizando testes de voo no laboratório.
Uma vez que o ornitóptero aprende por conta própriapousar em um galho de árvore, ele será capaz de realizar certas tarefas, como coletar discretamente amostras biológicas ou fazer medições na árvore. Eventualmente, pode até pousar em estruturas feitas pelo homem, o que pode abrir novos usos.
Raphael Zufferey, co-autor do desenvolvimento
Consulte Mais informação:
Dois planetas foram encontrados não muito longe da Terra. Talvez sejam habitados
Um meteoro único reescreveu a história do sistema solar: de onde veio
O módulo protótipo da nova ISS foi explodido no centro da NASA. olha como foi