O Facebook usará sistemas de visão computacional e processamento de linguagem natural que já estão
O robô é planejado para ser completamente autônomo.e auto-aprendizagem - os sistemas devem aprender diretamente a partir dos dados brutos. Isso permitirá que o dispositivo se adapte mais rapidamente a novos desafios e mude as circunstâncias, acredita a empresa. A base da inteligência artificial será a aprendizagem baseada no modelo RL, que permitirá que os robôs aprendam independentemente através de tentativa e erro.
Nós gostaríamos de ensinar o robô a andar sem ajuda. O movimento é uma tarefa muito difícil na robótica, e isso é muito emocionante, do nosso ponto de vista.
Desenvolvedor de Pesquisas do Facebook Roberto Calandra
Uma característica distintiva do robô do Facebooké que o dispositivo não será implementado algoritmos para o seu movimento. Inicialmente, ele não pode andar, no entanto, gradualmente, usando o algoritmo de aprendizagem, ele começa a interagir com seus controladores, que já podem ser ativados para o movimento. Quanto mais experiência um robô recebe, melhor funciona.

Neste caso, o robô não deve apenasdetermine sua localização e orientação no espaço, mas também mantenha o equilíbrio e conecte os impulsos dos sensores uns com os outros para o correto funcionamento de mecanismos complexos, como o joelho.
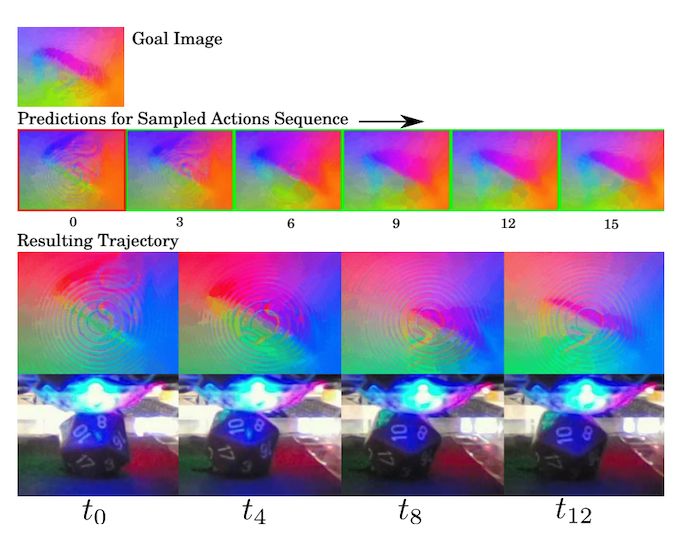
Robôs do Facebook para visão computacionaluse um dos algoritmos desenvolvidos para prever a popularidade dos vídeos. Uma rede neural pode analisar vários segundos de vídeo e prever quadros adicionais mesmo sem visualização, para acelerar a análise de uma grande quantidade de material.
Como parte do experimento de pesquisa do Facebookintroduziu o primeiro dispositivo - um manipulador que pode trabalhar com um joystick, rolar um cubo com 20 facetas e entender corretamente os resultados que caíram em um segundo ou outro.
A combinação de fontes de informação visuais e táteis pode melhorar os métodos de aprendizagem e a funcionalidade de futuras plataformas de autoaprendizagem, de acordo com o Facebook.
Segundo os desenvolvedores, agora semelhanteos projetos utilizam apenas um tipo (no máximo dois) de informação, ao passo que, para que os dispositivos robóticos funcionem plenamente, eles devem perceber informações de diferentes sentidos.