Pesquisadores da Faculdade de Engenharia da Universidade da Califórnia, Berkeley (Berkeley Engineering) apresentaram
Quando você olha para os caranguejos do mar, talvezparece que a escavação subterrânea é um processo simples. Mas quanto mais fundo o animal cava, mais fortes os “grãos” são repelidos, dificultando a escavação, explicam os criadores do dispositivo.
Robô - caranguejo marinho. Vídeo: Berkeley Engenharia
Para superar este problema e criar um escavadorcom pernas verticais, os pesquisadores projetaram as pernas do robô para responder à força anisotrópica. Isso significa que eles experimentam muito mais força em uma direção do que na outra. Como um nadador, as pernas de tecido macio deste robô se expandem com grande esforço durante a "batida" e, em seguida, dobram e retraem no corpo.
O segundo problema foi a poluição e a remoção demecanismos de construção devido à entrada de grãos de areia. Os cientistas também encontraram sua solução em Emerita Analoga. Os engenheiros criaram uma cutícula semelhante à membrana artrodial de um caranguejo-toupeira. É um material macio e flexível que reveste as aberturas das articulações. Impede a entrada de grãos, mas ao mesmo tempo permite a livre movimentação do robô.
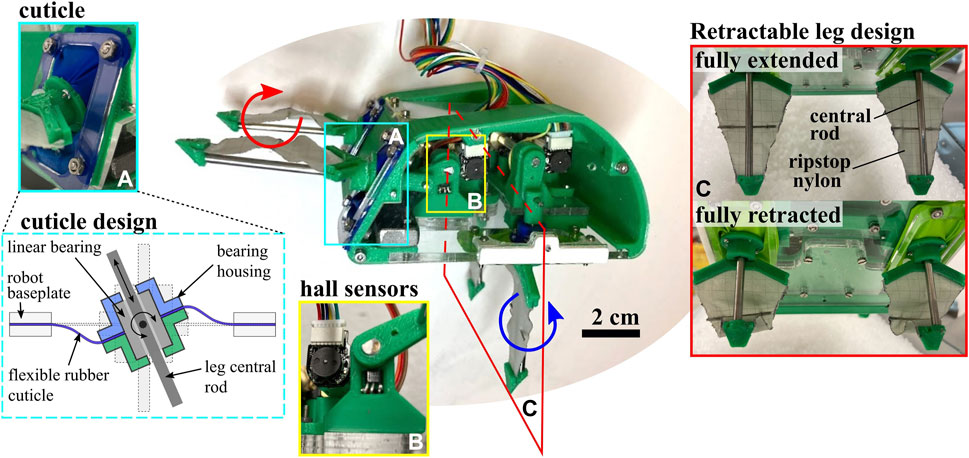 Dispositivo robô. Imagem: Engenharia Berkeley
Dispositivo robô. Imagem: Engenharia Berkeley
Robôs capazes de explorar o subsoloespaço, pode ser usado em uma ampla variedade de indústrias e áreas de pesquisa. Por exemplo, eles podem medir a qualidade do solo de terras agrícolas em potencial, realizar pesquisas antes dos trabalhos de construção e pesquisar o fundo do mar.
Consulte Mais informação:
Vazamento de gás do Nord Stream foi mostrado do espaço
Estruturas incomuns encontradas na borda do sistema solar. Apenas as Voyagers estiveram lá.
Veja como Júpiter e a Lua se aproximaram no céu noturno