Professor Edward Anderson do Instituto de Tecnologia de Massachusetts e sua aluna Sandra Liu
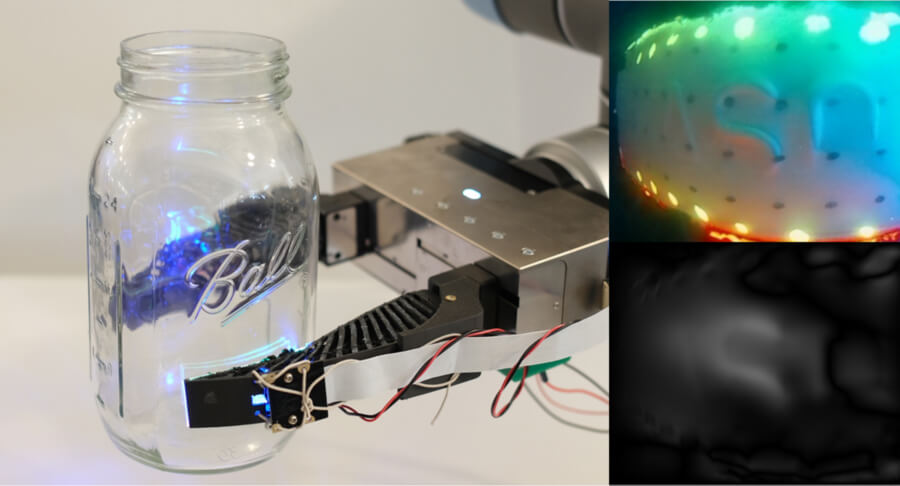
A empunhadura consiste em dois dedos flexíveis com nervuras,que se adaptam à forma do objeto com o qual estão em contato. Esses dedos, como em muitos desenvolvimentos semelhantes, são feitos de materiais plásticos flexíveis em uma impressora 3D. No entanto, em seu robô, os engenheiros removeram as nervuras transversais localizadas na parte interna dos dedos, dando-lhes rigidez. Em vez disso, os pesquisadores instalaram uma câmera e sensores.
Uma finauma folha de acrílico à qual são fixadas almofadas de gel de silicone “sensíveis”. Uma câmera é colocada no fundo da cavidade, direcionada para a camada de acrílico, e toda a cavidade é iluminada por LEDs.
Ao tocar um objeto, o dedo envolve suavementeele, fundindo-se com os contornos do objeto. A câmera e algoritmos especiais analisam a mudança nas folhas de silicone e acrílico. Com base na análise, o robô determina a forma geral do objeto, as irregularidades da superfície, a orientação do objeto no espaço e a força com que é necessário comprimir o objeto.
Os pesquisadores testaram seuscaptura fazendo apenas um dos dois dedos se tocarem. O dispositivo que eles criaram manipulou com sucesso vários objetos, como uma mini chave de fenda, um morango de plástico, um tubo de tinta e uma taça de vinho. Ao mesmo tempo, ao capturar morangos, o sensor interno conseguiu detectar com sucesso a granulação de sua superfície e, ao trabalhar com uma jarra, pôde ler o nome gravado.
 Fonte: Laboratório de Ciência da Computação e Inteligência Artificial do MIT
Fonte: Laboratório de Ciência da Computação e Inteligência Artificial do MIT
Como observam os autores da obra, os objetos de vidrorepresentam um desafio para os sensores de visão computacional devido à refração da luz. Os sensores táteis permitem contornar essa limitação. Quando o punho levantou o copo, ele sentiu a orientação da haste no espaço e pôde ter certeza de que o copo estava apontando para cima antes de baixá-lo até a mesa.
Os engenheiros observam que a criação de uma cavidade no interiordedo perturbou ligeiramente a estabilidade do aperto. Os cientistas planejam finalizar o design de seu dispositivo para corrigir essa falha. Além disso, eles planejam desenvolver um aperto de três dedos que pode, por exemplo, pegar pedaços de frutas e avaliar sua maturidade.
Consulte Mais informação:
MIT cria um motor térmico estacionário que supera turbinas
Após dez anos de trabalho, cientistas questionaram o modelo padrão da física
Veja como é o nascer do sol em Marte