O que são robôs soft?
A robótica suave é um campo especial da robótica que lida com
A robótica leve depende muito de comocomo os organismos vivos se movem e se adaptam ao seu ambiente. Ao contrário dos robôs construídos com materiais rígidos, os robôs macios oferecem maior flexibilidade e adaptabilidade para realizar tarefas, bem como maior segurança ao trabalhar com pessoas. Essas características permitem que seja utilizado na medicina e na indústria.
Robótica leve, principalmente em projetosrobôs feitos inteiramente de materiais macios. Como resultado, os robôs resultantes se assemelham a invertebrados, como vermes ou polvos. Simular o movimento de tais robôs é uma tarefa difícil. O fato é que para tais processos é necessário aplicar os métodos da mecânica contínua. É por isso que os robôs soft são às vezes chamados de robôs contínuos.
A mecânica do contínuo é um ramo da mecânica, física do contínuo e física da matéria condensada dedicada ao movimento de sólidos gasosos, líquidos e deformáveis, bem como interações de força em tais corpos.
Híbridos de robôs macios e duros
Para estudar fenômenos biológicos, os cientistas criam robôs suaves à imagem de organismos vivos e conduzem experimentos difíceis de realizar em organismos reais.
No entanto, existem robôs rígidos que também são capazes de deformação contínua, como o robô cobra.
Construções suaves podem ser usadas como parte deum robô rígido maior. Os efeitos macios do robô para agarrar e manipular objetos oferecem uma vantagem. A questão é que eles não destroem objetos frágeis.
Também é possível criar híbridos soft-hardrobôs que possuem uma estrutura interna rígida e elementos externos macios. Os elementos macios podem ter muitas funções: mecanismos de ação semelhantes aos músculos dos animais e material de amortecimento para garantir a segurança em caso de colisão com humanos.
 Um robô com rodas, pernas macias e capacidade de se mover no chão.
Um robô com rodas, pernas macias e capacidade de se mover no chão.
Foto: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra e Barbara Mazzolai
Robôs macios podem ser dobrados em qualquer formatoforma. Eles são feitos de materiais muito macios, incluindo nanomateriais. Isso os torna mais parecidos com partes do corpo humano, como os músculos. Na verdade, pode-se dizer que esses robôs estão quase ganhando vida com a ajuda de nanomateriais.
Apesar de muitas pesquisas na área de robôs leves, os engenheiros ainda estão no início de sua jornada. No entanto, os especialistas prevêem que até 2024 o seu mercado atingirá 2,16 mil milhões de dólares.
Como os robôs soft são diferentes dos comuns?
Os robôs de metal são muito mais limitados. Eles foram projetados com velocidade e precisão em mente, tornando-os ideais para coisas como trabalho em linha de montagem. Mas eles não são tão universais.
Os robôs macios são diferentes dos industriais ourobôs colaborativos em que sua construção é feita de materiais macios e flexíveis. Seu design é muito diferente de qualquer outra forma de robô, e robôs soft executam funções muito diferentes.
A maioria dos robôs soft ainda estão emnos primeiros estágios de desenvolvimento, e o primeiro robô soft foi desenvolvido em 2011 pelo professor de Harvard George Whitesides. Desde então, o número e os tipos de robôs soft aumentaram dramaticamente. Embora possam estar vários anos longe de sua real viabilidade comercial, eles ainda representam uma tecnologia interessante com grande potencial.
Robôs macios - uma inovação empolgante no mundorobótica. Os cinco tipos de robôs soft mencionados acima podem ter o maior potencial comercial de todos os tipos de robôs soft atualmente em desenvolvimento.
Ao contrário dos robôs industriais ou colaborativos, os soft robôs atendem a uma ampla variedade de aplicações.
Como os robôs soft são usados?
O apelo dos robôs soft está em sua flexibilidade e versatilidade.
6 tipos promissores de robôs soft
Existem muitos tipos diferentes de robôs soft, mas existem 6 aplicações diferentes que prometem o maior potencial comercial.
- Músculos robóticos:Vários tipos estão sendo desenvolvidos atualmenterobôs macios que atuarão como músculos robóticos. Um dos protótipos mais promissores se inspira no origami. Sua estrutura dobrada pode levantar 1.000 vezes seu próprio peso e tem comprimento de alguns milímetros a um metro. Além disso, os cientistas estão agora trabalhando na criação de robôs em nanoescala a partir do DNA.
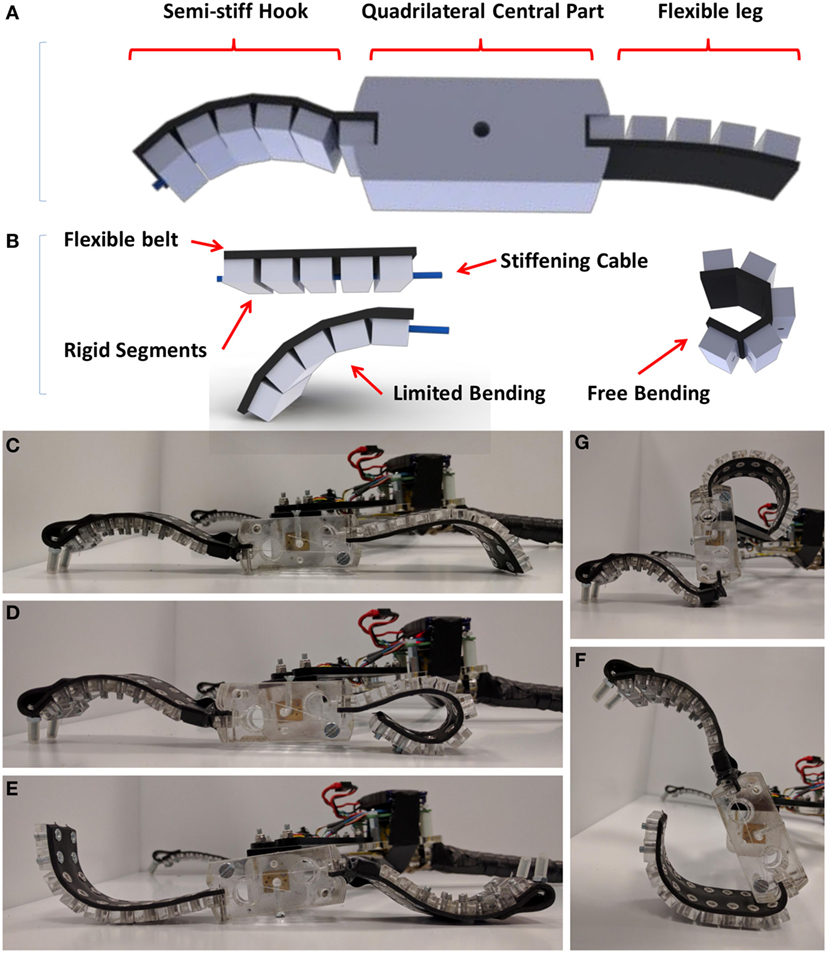
- Robôs escaladores:esses tipos de robôs têm muitos potenciaisaplicações que variam de inspeção e manutenção de edifícios a operações de busca e resgate Uma versão dos robôs escaladores suaves tem um design curvo, parecido com uma lagarta. Isso permite que ele rasteje para cima e para baixo em estruturas de tamanhos diferentes.
- Robôs comestíveis. O primeiro projeto desses robôs criado pela equipe da escola na Filadélfia para a competição anual Soft Robotics. Esses robôs biodegradáveis podem entregar medicamentos com segurança a várias partes do corpo.
- Robôs vestíveis.Esses dispositivos biomiméticos podem ajudarum paciente em reabilitação física. O robô macio imita o movimento natural do corpo onde quer que esteja, ajudando o paciente a recuperar a função motora normal.
- Robôs protéticos.Robôs flexíveis podem ser usados para criarpróteses superiores para pessoas com falta de membros ou partes do corpo. Freqüentemente, a tecnologia de robótica suave é usada na extremidade de uma mão protética para agarrar objetos com mais delicadeza e precisão.
- Robôs astronautas.Cientistas da NASA sugerem que um dia eles voarão na superfície de Marte. Outros já estão projetando robôs que trabalharão nas partes mais difíceis de alcançar do corpo humano.
Embora soft robôs também possam ser usados emambientes industriais - especialmente como robôs colaborativos (também conhecidos como "cobots") trabalhando com humanos, eles dificilmente se limitam a isso.
O primeiro robô autônomo soft do mundo
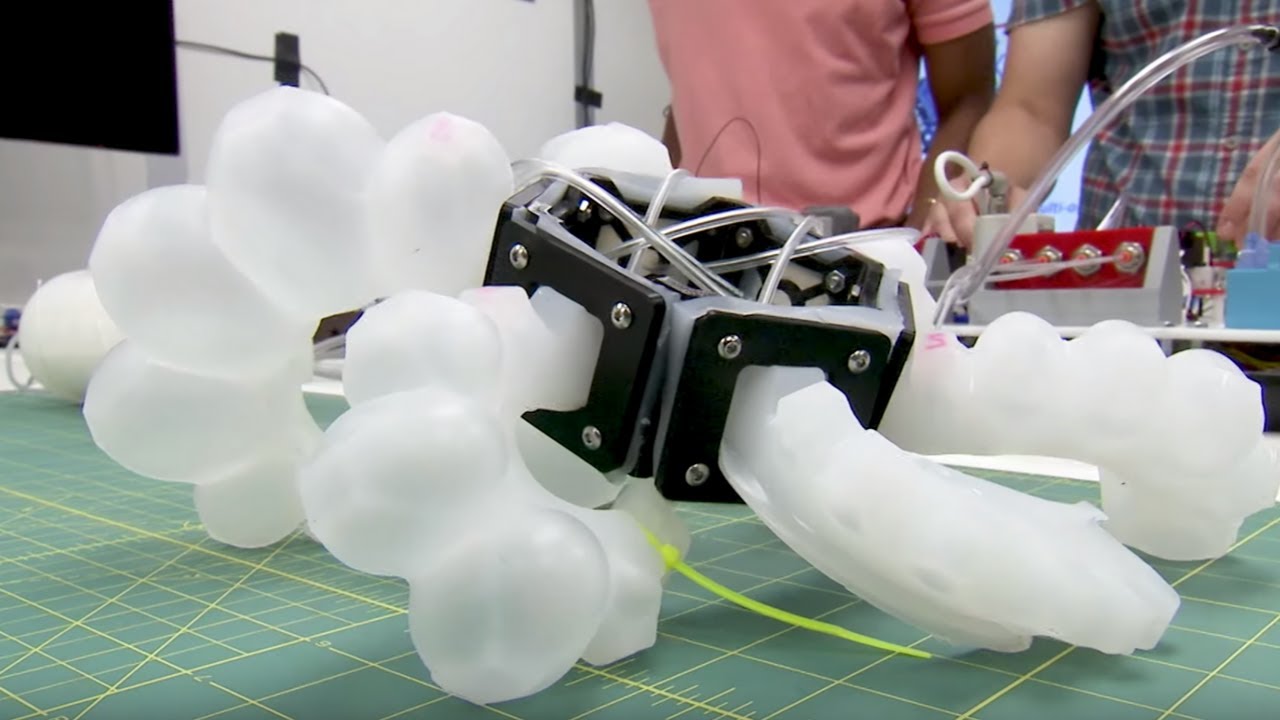
Em 2016, cientistas de Harvard usaramborracha de silicone líquida para o desenvolvimento do Octobot, o primeiro robô autônomo macio do mundo. Inspirados nos polvos, esses robôs macios podem girar e superar obstáculos que talvez não fossem possíveis para robôs de metal rígido e afiado, como os retratados em "O Exterminador do Futuro" ou "Guerra nas Estrelas".
Surpreendentemente, o Octobot é mais barato de fabricar,do que um café com leite, e custa apenas 5 centavos para reabastecê-lo. Pode-se imaginar centenas de robôs macios baratos sendo enviados para investigar a cena, superar obstáculos e gargalos para auxiliar na operação de resgate.
“O principal objetivo da robótica leve não é criarmáquinas ultraprecisas, porque já as temos '', disse a engenheira biomédica Jada Gerboni em sua palestra de 2018 no TED. "E para fazer robôs capazes de resistir a situações inesperadas no mundo real."
Robôs leves na medicina
Robôs macios podem ser usados comoinstrumentos cirúrgicos e médicos (em especial endoscópios). Sua vantagem é que eles se movem através das estruturas corporais com mais facilidade do que os instrumentos tradicionais. Isso dá aos médicos uma imagem mais clara da área do corpo do paciente que desejam examinar.
Roupas robóticas totalmente macias que podem ajudar as pessoas a se moverem está um passo mais perto da realidade com o desenvolvimento de um novo sistema de energia flexível e leve para a robótica macia.
Descoberta feita por uma equipe de BristolUniversidade, poderia abrir caminho para dispositivos de assistência vestíveis para pessoas com deficiência e pessoas que sofrem de degeneração muscular relacionada à idade. O estudo foi publicado hoje emCiência Robótica.
 Nova bomba fina e leve do tamanho de um cartão de crédito. Crédito: Tim Helps, University of Bristol.
Nova bomba fina e leve do tamanho de um cartão de crédito. Crédito: Tim Helps, University of Bristol.
Robôs macios são feitos de materiais flexíveis,que pode esticar e torcer. Esses materiais podem ser usados para fazer músculos artificiais que se contraem quando o ar é bombeado para eles. A maciez desses músculos permite o uso de roupas de apoio. No entanto, até agora, esses músculos artificiais pneumáticos eram acionados por bombas eletromagnéticas convencionais (acionadas por motor), que são volumosas, barulhentas, complexas e caras.
Pesquisadores da Bristol SoftLabe o Laboratório de Robótica da Bristol, liderado pelo Professor de Robótica Jonathan Rossiter, demonstrou com sucesso uma nova bomba eletropneumática que é macia, flexível, barata e fácil de fabricar.
No artigo, a equipe descreve como o novo softwareUma bomba do tamanho de um cartão de crédito pode impulsionar músculos artificiais com uma bexiga de ar e bombear fluidos. A equipe também está delineando os próximos passos para transformar roupas poderosas em realidade.
Da mesma forma, polímeros de titânio à base de carbonopode ser usado em combinação com polímeros sintéticos para criar músculos artificiais ultrafinos. Esta tecnologia foi demonstrada em reproduções artísticas de borboletas dançantes, folhas esvoaçantes e flores desabrochando no Instituto Avançado de Ciência e Tecnologia da Coreia.
Como funcionam os robôs soft?
Robôs macios especialmente concebidos paraimitações de vida, muitas vezes devem ser submetidos a tensões cíclicas ao se mover ou realizar qualquer outra tarefa. Por exemplo, no caso da lampreia ou do robô semelhante a um choco descrito acima, seria necessária a eletrólise da água e a ignição do gás para se mover, resultando em uma rápida expansão para impulsionar o robô para a frente. Essa expansão e contração repetitivas e explosivas criarão uma carga cíclica intensa no material polimérico selecionado. Um robô subaquático na Europa seria quase impossível de reparar ou substituir, portanto, deve-se tomar cuidado ao selecionar um material e design que minimiza a ocorrência e propagação de rachaduras por fadiga. Em particular, um material deve ser escolhido com um limite de resistência ou uma frequência de amplitude de tensão acima da qual a característica de fadiga do polímero não depende mais da frequência.
Uma vez que os robôs soft são feitos de softmateriais, os efeitos da temperatura devem ser levados em consideração. A tensão de escoamento de um material tende a diminuir com a temperatura e, em materiais poliméricos, esse efeito é ainda mais pronunciado. Em temperaturas ambientes e mais altas, as longas cadeias em muitos polímeros podem se esticar e deslizar umas ao longo das outras, evitando a concentração de tensão local em uma área e tornando o material plástico. Mas a maioria dos polímeros passa por uma temperatura de transição dúctil para frágil, abaixo da qual não há energia térmica suficiente para que cadeias longas reajam dessa maneira dúctil, e a destruição é muito mais provável. Acredita-se que a tendência de materiais poliméricos se tornarem frágeis em temperaturas mais baixas seja a causa do desastre do ônibus espacial Challenger e deve ser levada muito a sério, especialmente para robôs leves que serão introduzidos na medicina. A temperatura de transição dúctil para frágil não precisa ser o que pode ser considerada "fria" e, na verdade, é uma característica do próprio material, dependendo de sua cristalinidade, resistência ao impacto, tamanho do grupo lateral (no caso de polímeros) e outros fatores.
Desvantagens da tecnologia
Os robôs soft têm suas desvantagens.Especificamente, os cientistas descobriram que os atuadores de fluido – os dispositivos que realmente animam os robôs – demoram para ligar devido à grande quantidade de fluido necessária para o movimento ou porque seu fluxo é retardado por várias estruturas dentro do dispositivo (como tubos e válvulas). ).
No entanto, pesquisadores de Harvard estão desenvolvendoGambiarra. Observando que a flexão de tais brinquedos resulta na liberação de uma grande quantidade de energia, eles projetam atuadores com duas tampas retráteis, uma dentro da outra. Quando a tampa externa é inflada, a pressão aumenta contra a tampa interna. Quando ele se flexiona, a liberação de energia coloca o dispositivo em movimento.
Robôs macios têm potencial queestende-se a Marte e volta, e eles sem dúvida se tornarão uma grande parte da sociedade nos próximos anos. Suas capacidades são limitadas apenas pela imaginação humana.
Robôs macios e humanos
Robôs de corpo mole oferecem a capacidade deinterações sociais e táteis entre um ser humano e um robô, que requerem uma consideração cuidadosa da possibilidade de ligações emocionais inadequadas, bem como do comportamento pessoal e socialmente destrutivo dos usuários. Questões éticas relacionadas à interação homem-robô e como eles devem contribuir para o design da robótica leve no contexto da interação social são discutidas em um artigo para a revista Soft Robotics.
Thomas Arnold e Matthias Schoitz, Tufts University,Medford, Massachusetts, é co-autor de um artigo intitulado "The Tactile Ethics of Soft Robotics: Intelligent Design for Human-Robot Interaction." Eles exploram uma ampla gama de tópicos, incluindo a capacidade dos robôs soft de tocar e interagir com seu ambiente, os riscos potenciais de formar conexões emocionais humanas unilaterais com os robôs e para que robôs sociais devem ser projetados. Para ilustrar algumas das questões éticas associadas à robótica leve e os riscos potenciais para a sociedade, os autores discutem o exemplo dos robôs sexuais.
Os médicos Arnold e Schoitz sugerem trêso princípio de desenvolver robótica leve no contexto de uma pessoa social e um robô. Eles encorajam a comunidade da robótica leve a tratar dessas questões éticas como uma forma de melhorar a qualidade e a eficiência da interação humano-robô. “A tecnologia soft robot em breve nos trará máquinas que interagem diretamente com os humanos; é importante que comecemos a pensar no impacto que podem ter nas situações sociais. Este artigo descreve algumas das questões-chave e fornece uma orientação excelente para uma discussão séria da relação homem-robô ”, conclui Barry A. Trimmer, Ph.D., que dirige o Laboratório de Neuromecânica e Dispositivos Biomiméticos na Tufts University em Medford, Massachusetts .
Leia também
O primeiro mapa preciso do mundo foi criado. O que há de errado com todo mundo?
Veja as fotos do Hubble de nebulosas planetárias.
Os físicos criaram um análogo de um buraco negro e confirmaram a teoria de Hawking. Para onde isso leva?