O nome Dyret (norueguês para "animal") é um acrônimo para Dynamic Robot for Empowered Testing.
“Demonstramos os benefícios de sero robô pode adaptar constantemente sua forma corporal. Nosso robô prova que isso pode ser feito facilmente com tecnologia moderna ”, explica Tonnes Nygaard, professor sênior do Departamento de Ciência da Computação da UiO.
No caso de Dairet, a remodelagem do corpo significa que ele regula o comprimento das pernas. O mecanismo de adaptação da forma do corpo tem se mostrado muito útil para o robô.
Os cientistas já haviam mostrado que seu robô está se adaptandoa vários ambientes sob condições internas controladas. Nygaard então passou seis meses com colegas engenheiros da Organização de Pesquisa Científica e Industrial da Commonwealth (CSIRO) na Austrália. Ela é especialista em testes externos de robôs de autoaprendizagem.
“Pensava-se que era muito difícilalcance no mundo real. Com a ajuda de robôs e de nossos experimentos, mostramos que isso é possível”, explica Nygaard em entrevista ao Titan.uio.no. Os resultados do trabalho foram publicados na revistaNature Machine Intelligence.
Ao alterar o comprimento de suas pernas, o robô podealterar automaticamente a forma do corpo. Robôs morfologicamente adaptáveis podem operar em ambientes imprevisíveis e enfrentar novos desafios sem ter que reprojetar sua estrutura ou reconstruir cada vez que encontram algo inesperado.
É difícil para os humanos imaginar como é difícil para um robô se mover, por exemplo, do concreto para a grama. Não se esqueça que uma pessoa tem muitos anos de experiência e muitos sentimentos em relação a um robô.
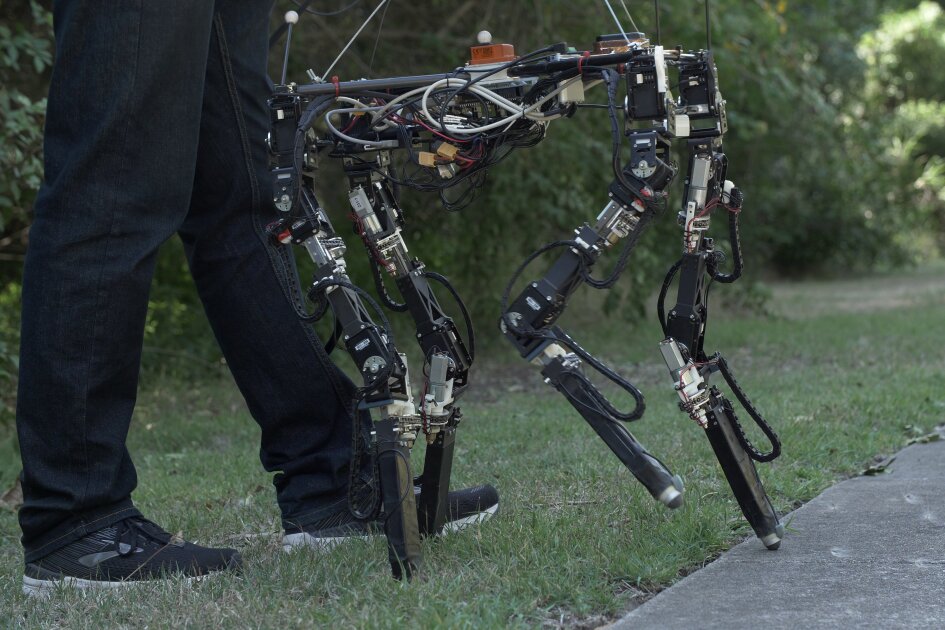 Da grama ao concreto: um salto gigante para o robô autodidata. Crédito: Tønnes Nygaard / UiO.
Da grama ao concreto: um salto gigante para o robô autodidata. Crédito: Tønnes Nygaard / UiO.
“O robô usa a câmera para vero quão irregular é o terreno e sensores nas pernas para determinar o quão difícil é a superfície para andar, explica Nygaard. “Diret está constantemente aprendendo sobre o ambiente em que caminha e, combinado com o conhecimento adquirido em ambientes internos em um ambiente controlado, usa isso para adaptar seu corpo.”
Quando Diret foi convidado a andar na grama, elenunca vi grama antes. Ele treinou apenas em cascalho, areia e concreto. No entanto, ele aprendeu rapidamente a andar na grama australiana e qual era o comprimento ideal das pernas. Verificou-se que pernas mais curtas fornecem melhor estabilidade para o robô, enquanto pernas mais longas fornecem maior velocidade de caminhada se o solo for previsível.
Um gramado plano pode não ser o maiorproblema, mas a grama na natureza está cheia de tufos e buracos que podem prender um robô de pernas compridas, então Dairet encurta suas pernas. No concreto, ele pode retirá-los e "fugir".
O robô também se adapta a danos ao bater em obstáculos imprevistos.
“Usando nossa tecnologia, o robô podeadaptar-se a uma de suas pernas ficando mais fraca ou quebrando. Ele pode aprender a se recuperar mancando ou reduzindo o comprimento das outras três patas”, diz Nygaard. Ao aprender com seus erros e falhas, Dayret se adapta melhor ao ambiente.
Até que Dairet esteja pronto para assumir responsabilidades sériastarefas. O objetivo do doutorado de Nygaard era desenvolver tecnologia e encontrar materiais adequados e provar que era possível. No entanto, ele vê vários usos futuros possíveis. Por exemplo, o robô é útil em operações de busca e resgate, bem como na agricultura, onde existe uma grande variedade de superfícies difíceis e condições climáticas. Além disso, a Dairet ajudará na exploração de minas onde as pessoas são difíceis de encontrar.
Consulte Mais informação
Os físicos criaram um análogo de um buraco negro e confirmaram a teoria de Hawking. Para onde isso leva?
Urano recebeu o status de planeta mais estranho do sistema solar. Porque?
O instrumento científico SuperCam do rover Perseverance envia os primeiros resultados para a Terra