Quem são robôs?
Alguns anos atrás, algo legal apareceu no Reddit - cientistas descreveram complexos
A robótica é uma aplicação sinérgicacampo de atividade. Consiste em programação, mecatrônica e cibernética. A mecatrônica é algo que interage com o mundo real. E a cibernética é uma ciência multilink, que inclui, antes de tudo, a gestão dos programas criados.
O que é um robô?Há 15 anos, muitos diriam que se trata de um braço robótico que trabalha em uma fábrica e faz solda ou pintura. Outra resposta popular é o robô android do mundo do cinema. Mas um carrinho em movimento ou um veículo não tripulado é um robô? Sim, esta também é uma das áreas da robótica. Aeronaves também são robôs, alguns dos mais recentes desenvolvimentos incluem tecnologias inteligentes e são, de fato, robôs autônomos.
 O carrinho móvel também é um robô
O carrinho móvel também é um robô
Há também uma área de robótica como camporobótica - "robótica móvel". Isso inclui todos os robôs que se movem em um campo, prédio ou debaixo d'água. A aplicação mais interessante, na minha opinião, é a agricultura.
História das aeronaves
A história das aeronaves começou no passadoséculo. Antes disso, apenas balões sem motor voavam, e era difícil chamá-los de robôs. No início do século passado, dois tipos de aeronaves funcionavam - dirigíveis e aviões. O primeiro voo controlado foi feito pelos irmãos Wright. Além disso, o primeiro piloto automático apareceu bem rápido, quase 10 anos depois, ajudou a estabilizar o voo.
A direção atual da robótica está relacionadadesenvolvimento e disponibilização de novos pilotos automáticos abertos como o PixHawk (PixHawk é um hardware aberto para controladores, drones e outros UAVs. É usado para fins acadêmicos, amadores e profissionais). Um exemplo da chegada dos drones na vida de cada pessoa é a entrega de pizza pela empresa Dodo Pizza em conjunto com a Copt Express - isso aconteceu em 2014.
 História das aeronaves
História das aeronaves
Como o drone é controlado
Aeronaves modernas usam umdos três princípios de criação de sustentação - aerostático, jato ou aerodinâmico. O princípio aerodinâmico de voo e a criação de sustentação (jogando parte do ar) podem ser implementados devido ao movimento de todo o aparelho, equipado com uma superfície de rolamento fixa (asa), ou devido ao movimento de peças de rolamento individuais do aparelho (rotor principal, ventilador) em relação ao ar.
 Como os dispositivos voam
Como os dispositivos voam
O drone tem uma hélice que cria sustentação.Ao sair do chão, o dispositivo começa a mover a hélice mais rapidamente e sobe. Mas a força da ação é igual à força da reação. Quando a hélice gira, um momento é criado na direção oposta - esse é o design de helicópteros e helicópteros. Se o helicóptero tiver uma hélice, não será estável. Portanto, o dispositivo usa um esquema de dois rotores ou um rotor de cauda.
O quadcopter tem um design muito simples -Geralmente tem quatro parafusos, dois dos quais giram em uma direção e dois na outra direção. Se o usuário precisar avançar, algumas hélices giram mais devagar enquanto outras giram mais rápido. E se o usuário quiser girar, alguns parafusos colocados na diagonal aceleram, enquanto outros desaceleram.
 Como um quadricóptero voa
Como um quadricóptero voa
Os movimentos do helicóptero nos cantos estão relacionados ao movimento ao longocoordenadas. Se o piloto quiser avançar, precisamos primeiro inclinar o drone para frente e depois, à medida que o dispositivo elétrico avança, estabilizá-lo no ponto onde queremos ficar.
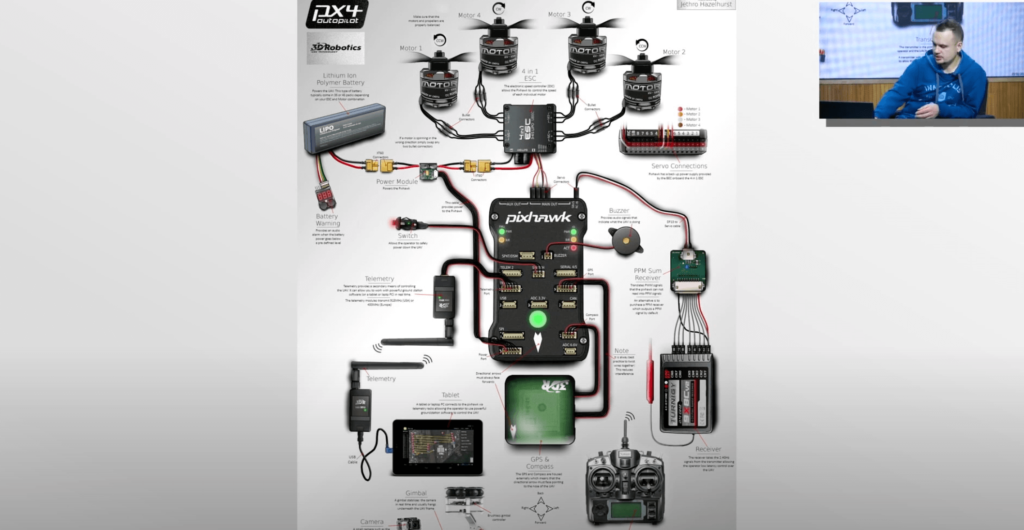
Este é um diagrama de um dos pilotos automáticos mais populares,com base nos quais novos dispositivos podem ser feitos. Ele se conecta a todos os motores e sensores. Além disso, os motores possuem uma unidade de controle própria, o regulador ESC – Electronic Speed Controller, que controla a velocidade do motor.
Dos sensores, há GPS para que o drone possatrabalhe ao ar livre, voe para pontos e estabilize a posição. Mas dentro do próprio piloto automático há também um IMU - um módulo de sensor inercial que permite determinar os ângulos de atitude. Há também um canal de comunicação, uma estação de controle de solo e uma bateria.
 Dispositivo UAV
Dispositivo UAV
Como mencionado acima, existe um nívelcontrole do motor - nós, sem hesitação, podemos definir a velocidade de rotação. Os demais níveis funcionam com o mesmo princípio: o próximo é o controle de orientação.
Mas primeiro precisamos controlar a velocidade de rotação- Os helicópteros FPV voam neste nível (dispositivos que permitem ver a imagem da câmera do drone em tempo real na primeira pessoa (FPV - First Person View). Pilotos experientes definem a velocidade de rotação e dirigem constantemente com o joystick. O próximo O estágio é quando o usuário consegue estabilizar o ângulo, mas o drone ainda vai se mover. Em seguida é o controle de velocidade, e o mais alto é o controle posicional, manobras para se mover para um ponto ou se mover ao longo de uma determinada trajetória.
Quem quer programar, construir edrones de controle - deve prestar atenção ao piloto automático de código aberto PIX4. Existe toda uma comunidade em torno da robótica aérea (ROS - Robotic Operating System, ou Robótica Aberta), existem simuladores para drones. Portanto, muitos experimentos podem ser realizados no simulador sem ter o próprio drone.
Etapas de desenvolvimento de drones
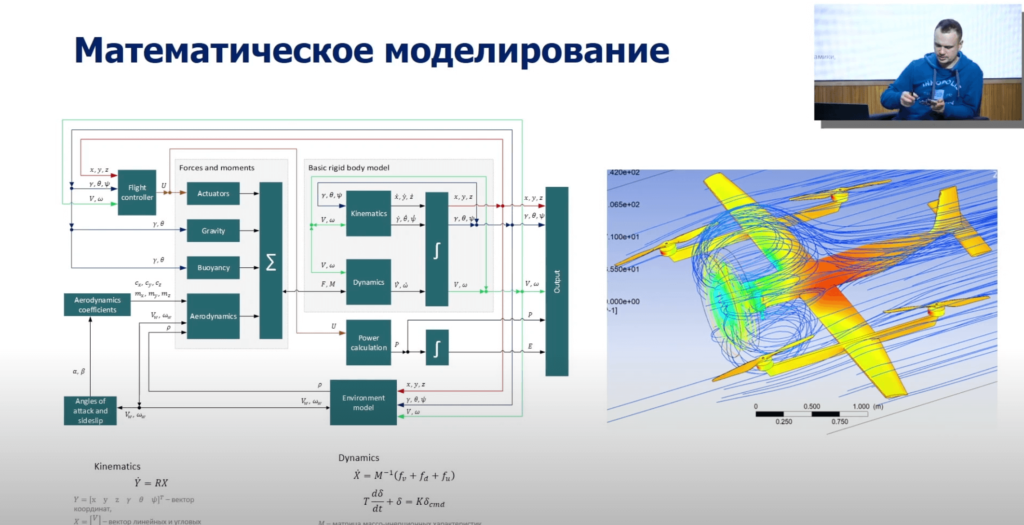
Os pesquisadores começam com uma visão conceitualmodelagem, e então eles precisam construir um modelo preciso do aparelho. Sem entrar na fórmula, um modelo de helicóptero é essencialmente um modelo de corpo rígido. Esta é a segunda lei de Newton estendida a sistemas de partículas. Possui movimento translacional e rotacional, há cinemática e dinâmica de movimento, e para descrever o modelo de um dispositivo específico, devemos adicionar aqui a equação das forças que atuam em um drone específico.
 Como os UAVs são modelados
Como os UAVs são modelados
O próximo passo é desenvolver o sistemagestão. Se seguirmos o caminho clássico: primeiro descobrimos o modelo matemático exato e, com base nele, já sintetizamos o algoritmo de controle ou novas fórmulas. Todos os níveis podem ser incluídos no sistema de controle: planejamento de movimento, percepção do ambiente, estimativa de estado com a ajuda de sensores. Os algoritmos nos permitem refinar nossas coordenadas e dados.
 Sistema de controle de drones
Sistema de controle de drones
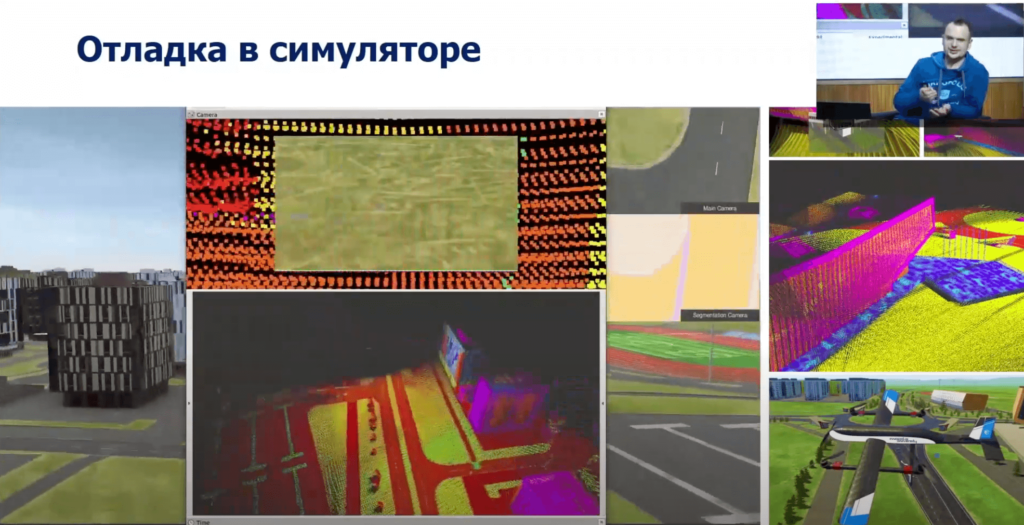
Quando existe um algoritmo de controle, ele pode ser imediatamenteaplicar, mas fazê-lo é bastante caro. Os dispositivos travam ao menor erro - isso deve ser levado em consideração e os backups feitos. Simuladores são usados para testes.
Abaixo está um tour virtual de Innopolisé um produto da nossa universidade, está disponível para download no GitHub. Este não é apenas um componente visual, mas também os dados de todos os sensores do dispositivo. Possui todos os sensores de posição, é controlado como um drone e pode depurar todos os algoritmos de controle.
 Como os drones aprendem na simulação
Como os drones aprendem na simulação
Quando baseado na experiência com o simulador aparecemais confiança - você pode passar para a implementação de hardware. Seus componentes são mostrados aqui: a fabricação do dispositivo de carbono e compósito, a criação de eletrônicos, a colocação de motores, sua fixação.
Os testes não começam na rua:Primeiro, os dispositivos são testados em uma suspensão ou suporte especial. Eles podem ser usados para depurar elementos do funcionamento de um veículo aéreo não tripulado. Por exemplo, uma aeronave vertical de decolagem e pouso é mostrada aqui - este é um híbrido de helicóptero e avião, no vídeo você pode ver como ela lida com perturbações externas e mantém um ângulo. À direita está um experimento bem maluco onde você liga cinco motores ao mesmo tempo e vê como o sistema de controle lida com isso.
 Como os drones são construídos
Como os drones são construídos
Após o teste, eles passam para os voos -pequenas decolagens em baixas velocidades, movimento controlado com um piloto que pode assumir o controle. O acorde final é um vôo completamente não tripulado.
O dispositivo decola verticalmente -“como um helicóptero”, então seu motor principal é ligado, o drone acelera, muda para o modo avião e desenvolve velocidade suficiente para a asa funcionar. Em seguida, as hélices de contorno são desligadas e ele voa como um avião - o processo de pouso é feito na ordem inversa.
O que está acontecendo com os drones
Uma das tarefas que os modernoscientistas — contornando obstáculos em voo. Alguns drones já sabem como fazer isso, mas a tarefa é um pouco mais ampla - você precisa ensinar os dispositivos a se moverem o mais rápido possível em um ambiente com obstáculos. E ainda há espaço para se esforçar e melhorar os algoritmos.
Outro exemplo de tais testes é um voo parafloresta. Há uma abordagem muito interessante - não apenas novos algoritmos são usados aqui, mas também sensores - uma câmera de eventos. Esta é uma câmera de alta frequência que transmite a diferença entre os quadros em cada unidade de tempo: isso permite controlar e reagir rapidamente aos obstáculos.
No campo do planejamento de movimento de drones,concorrência: quem o fará mais rápido. A tarefa é mapear uma área desconhecida, construir sua representação tridimensional, encontrar objetos nela. Voamos na universidade, mas também resolvemos o problema de encontrar objetos. Nossos resultados foram ainda melhores do que os algoritmos publicados conhecidos.
Existem competições na corrida de drones.Eles são feitos em dispositivos com câmera, quando o piloto tem óculos e controla o drone para voar pelo portão o mais rápido possível. Um evento bastante espetacular, onde a mesma tarefa deve ser realizada no modo automático. Infelizmente, até agora o computador conseguiu derrotar uma pessoa apenas no xadrez, e o robô drone não conseguiu ultrapassar um piloto humano, embora o progresso já seja bastante sério. Um drone com a ajuda de um algoritmo de visão de máquina pode realizar tais tarefas, o trabalho é apenas aumentar a velocidade.
Outra competição é o Microsoft Games ofdrones, é realizado em um simulador. Na mesma área, é realizada uma das famosas competições de liderança na Arábia Saudita. Os participantes são recrutados com três anos de antecedência.
Dispositivos não tripulados são usados para shows de drones- São eventos espetaculares que hoje substituíram os fogos de artifício. Mas esse não é o único uso do grupo - eles podem inspecionar uma área maior.
Onde aplicar
Para que não pareça exclusivamente científicodesenvolvimento, abaixo está uma demonstração do drone Skydio. Agora este é o dispositivo mais avançado em termos de autonomia. Este é um exemplo de como as tecnologias modernas - cartografia, prevenção de obstáculos, planejamento de tráfego são utilizadas em conjunto em um produto já disponível para o usuário.
Outra direção são novos designsaeronave. Um deles são os drones dobráveis. Um desses dispositivos pode voar para espaços apertados para inspeção após um acidente. Outro exemplo é um drone que pode se desdobrar. Por exemplo, ele pode voar para fora de um tubo pneumático estreito e depois voar normalmente.
Temos também um projeto nesta área - este éTensodrone macio. Este é o primeiro drone de casco macio que voa. O prazer é que você pode soltá-lo e ele permanecerá intacto. Além disso, você pode alterar o comprimento das vigas, a tensão dos cabos.
Dois exemplos que ganharão vida embreve. Primeiro, entrega usando drones. Agora existe uma implementação muito interessante onde combinamos um terminal de encomendas e uma estação de pouso de drones - neste caso, não precisamos nos preocupar com quando o drone chegará, onde pousará, para que possamos chegar até ele em tempo e pegue a carga antes que ela seja roubada. O segundo exemplo é um táxi voador. Esta é a área de desenvolvimento mais interessante e já existem protótipos em funcionamento. Mas isso só acontecerá na próxima década.
Que desenvolvimentos no campo dos táxis voadores surgiram nos últimos 6 anos:
- A empresa "Hover" apresentou um dispositivo commotor elétrico de baixo ruído e dimensões compactas - como um carro. Ele decola a uma altura de 150 m e pousa em uma vaga de estacionamento padrão. O drone foi projetado para dois passageiros, a carga útil máxima é de 300 kg e a velocidade é de 200 km/h.
— Em 2016, a empresa russa Hoversurfmostrou uma hoverbike que você pode carregar com você e decolar a qualquer momento de um estacionamento regular da cidade. Atinge velocidades de até 100 km/h, e a altura de elevação é forçosamente limitada a 5 metros por razões de segurança.
— Em 2018, desenvolvido pela Airbus passageiraA aeronave Alpha One VTOL subiu a uma altura de 5 metros e permaneceu no ar por 53 segundos. O usuário poderá ligar para o UAV através do aplicativo e ir de um ponto a outro tanto dentro da cidade quanto fora dela.
— Em 2020, o táxi aéreo CityAirbus fezprimeiro voo livre. Os testes foram realizados nos subúrbios de Paris, na cidade de Ile-de-France.A aeronave CityAirbus é capaz de se mover a velocidades de até 120 km/h por uma distância de até 30 km. O peso do táxi voador é superior a 2,2 toneladas, o CityAirbus está equipado com três assentos de passageiros e um assento de motorista.
- Em 2022, a startup chinesa Pantuo Aviation apresentou o T1, um demonstrador de táxi voador com duto de ar. Ele voará a velocidades superiores a 300 km/h e terá um alcance de 250 km.
Consulte Mais informação:
A sonda espacial voou 200 km de Mercúrio. Olha o que ele viu
Cientistas descobrem como as vitaminas afetam a incidência de câncer
Capacete chinês de leitura da mente soa o alarme quando uma pessoa vê conteúdo pornográfico