Inginerii de la Universitatea din Cambridge au dezvoltat o mână robotică moale imprimată
Cercetătorii au folosit tipărite3D a imprimat o mână antropomorfă cu senzori tactili implantați, astfel încât mâna să poată „simți” ceea ce atinge. Mâna era capabilă doar de mișcări pasive bazate pe încheietura mâinii. „Marele avantaj al acestui design este gama de mișcare pe care o putem realiza fără a folosi niciun dispozitiv de acţionare”, spun autorii.
Antrenarea unui braț robotic „pasiv”. Video: Universitatea din Cambridge
Oamenii de știință au efectuat peste 1.200 de teste cu brațul robotului,observându-i capacitatea de a prinde obiecte mici fără a le scăpa. Robotul a fost antrenat inițial folosind bile mici de plastic imprimate 3D și le-a prins folosind acțiuni predefinite învățate din demonstrații umane.
Robotul a folosit încercări și erori pentru aafla care captură va avea succes. După ce a terminat de exersat cu mingile, a încercat să apuce diverse obiecte, inclusiv o piersică, un mouse de computer și o rolă de folie cu bule. În aceste teste, mâna a reușit să apuce cu succes 11 din 14 obiecte.
Capturați obiecte de diferite dimensiuni, forme și texturi- o sarcină simplă pentru o persoană, dar dificilă pentru un robot. Majoritatea roboților avansați de astăzi nu sunt capabili să îndeplinească sarcini de manipulare pe care copiii mici le pot gestiona cu ușurință. De exemplu, oamenii știu din instinct cât de multă forță trebuie aplicată pentru a ridica un ou, dar pentru un robot aceasta este o problemă: o prindere care nu este suficient de puternică va face ca obiectul să cadă, în timp ce o prindere prea puternică se va rupe. oul.
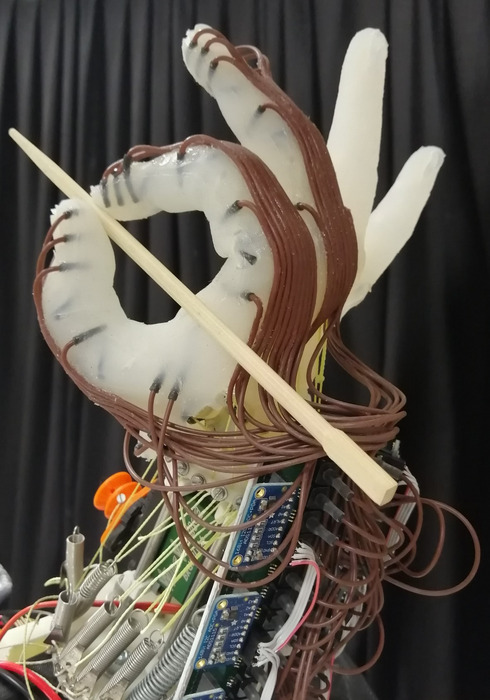 Prototip de prindere robotizată. Imagine: Universitatea din Cambridge
Prototip de prindere robotizată. Imagine: Universitatea din Cambridge
Tehnologie sofisticată cu degete motorizatenecesită o cantitate semnificativă de energie și un număr mare de actuatoare complexe și costisitoare pentru fiecare articulație. Prinderea pasivă propusă de ingineri face robotul mult mai ușor de controlat și mult mai eficient energetic. Cercetătorii cred că designul lor adaptabil ar putea fi folosit pentru a dezvolta o robotică ieftină capabilă de mișcări mai naturale.
Citeste mai mult:
Privește harta cu cea mai mare rezoluție a lui Marte: 110.000 de cadre și 5,7 trilioane de pixeli
„Marea” de quarci în interiorul unui proton: în ce constă o particulă elementară
O nouă imagine a lui Hubble i-a nedumerit pe oamenii de știință
Pe copertă: un prototip de prindere robotizată. Imagine: Universitatea din Cambridge