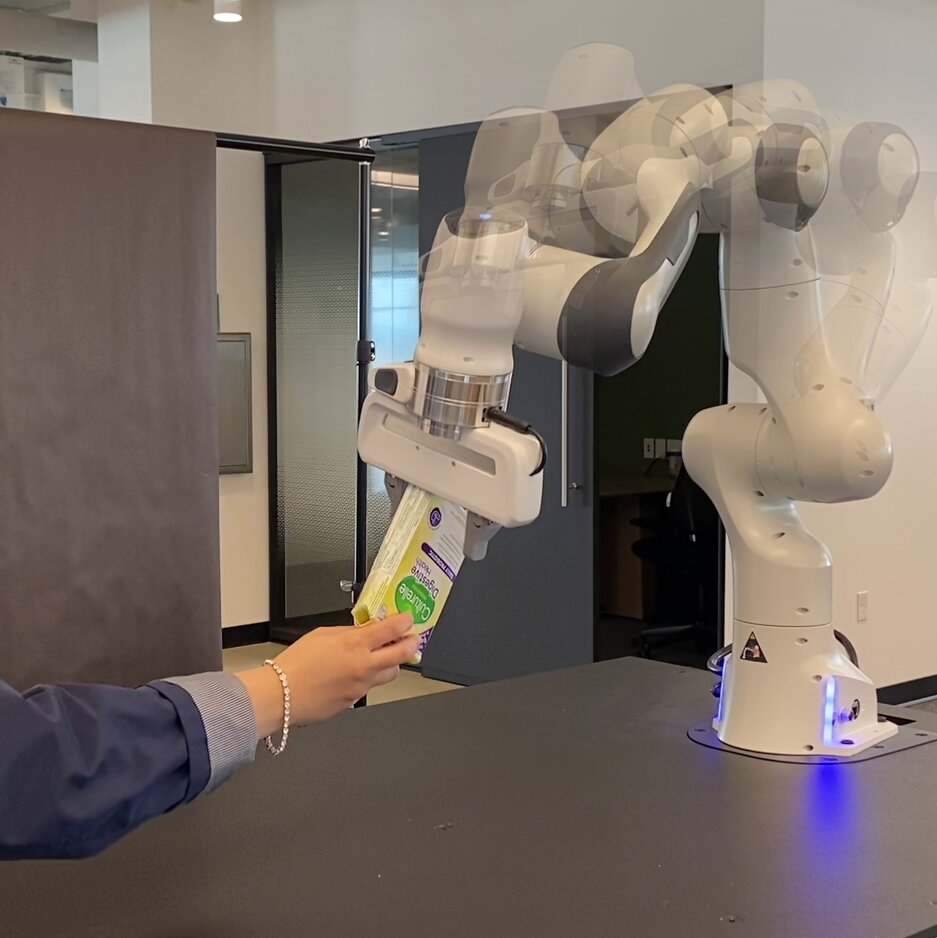
Noul model prezice în ce mod va lua dispozitivul un obiect din mâna unei persoane. Ea definește
„Abordarea noastră MPC, numită STORM,funcționează prin eșantionarea multor mișcări posibile diferite pe care robotul le poate face de la locația sa actuală până la locul în care se află obiectul”, a explicat Fox. „Folosește calculul GPU pentru a estima aceste traiectorii. Puteți verifica până la 500 de traiectorii în același timp.”
Modelul actualizează deciziile robotului de câteva ori pe secundă. Acest lucru îi permite să adapteze rapid traiectoria planificată și deciziile sale cu privire la locul în care să ridice obiectul.
Autorii au evaluat performanța modelului lor înmai multe experimente în care roboții au trecut și au primit diverse obiecte în timp ce interacționau cu patru persoane. Cercetătorii au numit rezultatele lucrării de succes.
Citeste mai mult:
A fost vânat de secole: ce știm despre planeta Vulcan de lângă Soare
Astronomii au găsit o planetă în apropierea Pământului: are o orbită foarte ciudată
Dualitate inexplicabilă găsită în fizica particulelor elementare: la ce va duce