Metoda de învățare propusă de robotiști permite robotului să învețe în mod autonom să efectueze manevre de înot.
„În studiul nostru am prezentato metodă de control al învățării prin întărire biologică pentru simularea mișcării roboților subacvatici”, a spus Gang Chen, unul dintre autorii dezvoltării. „Această metodă se bazează pe una dintre lucrările noastre anterioare despre mișcarea castorului, publicată în Springer Link’s Journal of Intelligent & Sisteme robotizate”.
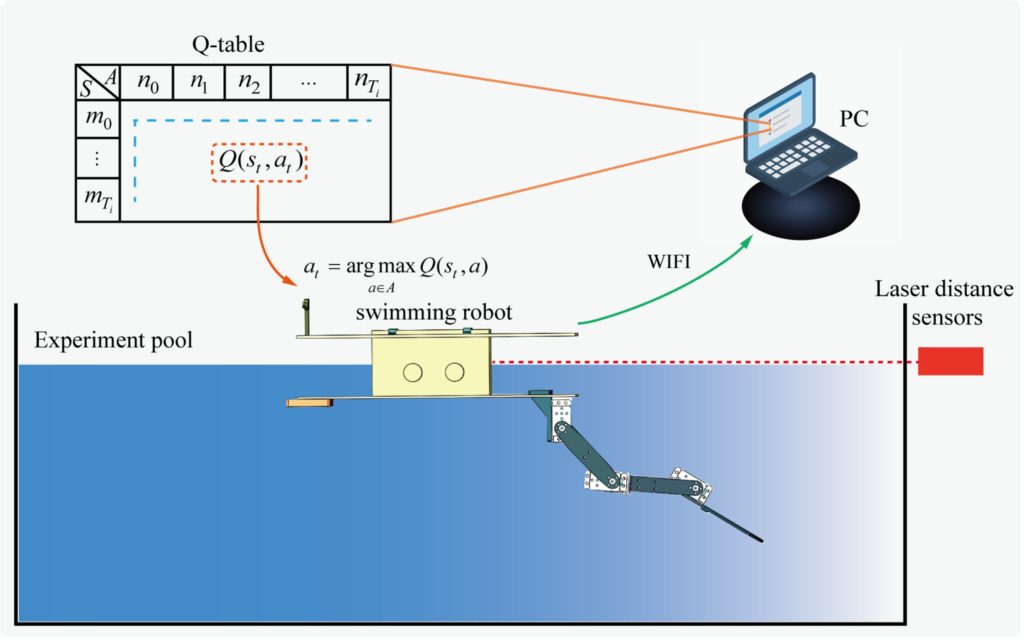 Principiul antrenamentului robotului castor
Principiul antrenamentului robotului castor
Roboți subacvatici precum cel creat de Chen și ai luicolegii sunt sisteme neliniare, iar mișcările lor implică hidrodinamică complexă. Astfel, modelarea cu acuratețe a mișcării lor poate fi o sarcină foarte complexă care necesită resurse de calcul semnificative.
Spre deosebire de alte modele de control submarinAbordarea robotică dezvoltată de Chen și colegii nu necesită integrarea unor modele complexe de mișcare bazate pe dinamica fluidelor. Acest lucru se datorează faptului că se bazează pe o simplificare a ideilor despre activitatea articulațiilor responsabile de înotul la castori. Acest lucru facilitează antrenamentul modelului și, de asemenea, reduce mișcările ineficiente ale robotului în timpul antrenamentului.
„Prin combinarea învățării prin întărire cumecanismele care stau la baza comportamentului de înot al castorilor, metoda noastră implementează controlul robotului asupra înotului cât mai rapid și eficient posibil”, a explicat Chen. „Cel mai notabil beneficiu este că evită crearea de modele complexe de control al mișcării și implementează rapid controlul înotului al unui robot cu un singur picior asemănător unui castor.”
Citeste mai mult
Satelitul american „a văzut” un mesaj neobișnuit de pe Pământ
Video publicat de la rachetă, care a fost lansată de la un accelerator experimental
Monstrul din centrul galaxiei noastre: uită-te la fotografia unei găuri negre din Calea Lactee