Ce sunt roboții moi?
Robotica soft este o ramură specifică a roboticii care se ocupă de
Robotica moale depinde în mare măsură demodul în care organismele vii se mișcă și se adaptează la mediul lor. Spre deosebire de roboții construiți din materiale rigide, roboții moi oferă o flexibilitate și o adaptabilitate sporite pentru îndeplinirea sarcinilor, precum și o siguranță sporită atunci când lucrează cu oameni. Aceste caracteristici permit utilizarea sa în medicină și industrie.
Robotica moale în principal proiecteazăroboți realizați integral din materiale moi. Drept urmare, roboții rezultați arată ca nevertebrate precum viermi sau caracatițe. Simularea mișcării unor astfel de roboți este o sarcină dificilă. Faptul este că pentru astfel de procese este necesar să se aplice metodele mecanicii continuumului. Acesta este motivul pentru care roboții moi sunt uneori numiți roboți continuu.
Să ne amintim, mecanica continuului - secțiunemecanică, fizica continuumului și fizica materiei condensate, dedicate mișcării solidelor gazoase, lichide și deformabile, precum și interacțiunilor de forță în astfel de corpuri.
Hibrizi de roboți moi și duri
Pentru a studia fenomenele biologice, oamenii de știință creează roboți moi în imaginea organismelor vii și efectuează experimente greu de realizat pe organisme reale.
Cu toate acestea, există roboți rigizi care sunt, de asemenea, capabili de deformare continuă, cum ar fi robotul șarpe.
Construcțiile moi pot fi utilizate ca parte arobot rigid mai mare. Robotii cu efect moale pentru prinderea și manipularea obiectelor oferă un avantaj. Ideea este că nu distrug obiecte fragile.
De asemenea, este posibil să creați hibrid soft-hardroboți care au un cadru rigid intern și elemente moi exterioare. Elementele moi pot avea multe funcții: atât mecanisme de acțiune similare cu mușchii animalelor, cât și materiale de amortizare pentru a asigura siguranța în caz de coliziune cu oamenii.
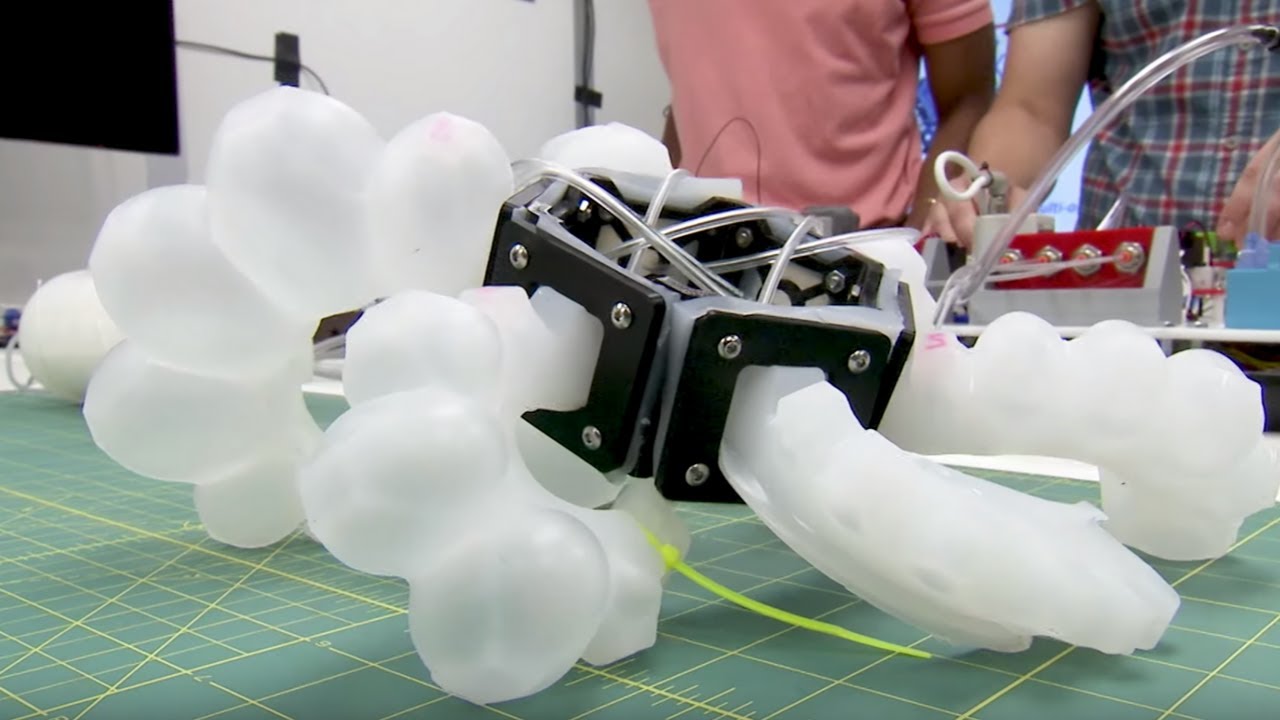
 Un robot cu roți, cu picioare moi și cu capacitatea de a se mișca pe sol.
Un robot cu roți, cu picioare moi și cu capacitatea de a se mișca pe sol.
Foto: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra și Barbara Mazzolai
Roboții moi pot fi îndoiți în orice formăformă. Sunt fabricate din material foarte moale, inclusiv nanomateriale. Acest lucru le face mai asemănătoare părților corpului uman, cum ar fi mușchii. De fapt, ai putea spune că acești roboți aproape prind viață cu ajutorul nanomaterialelor.
În ciuda multor cercetări în domeniul roboților moi, inginerii sunt încă la începutul călătoriei lor. Cu toate acestea, experții prevăd că până în 2024 piața lor va ajunge la 2,16 miliarde de dolari.
În ce fel diferă roboții moi de roboții obișnuiți?
Roboții metalici sunt mult mai limitați. Au fost construite având în vedere viteza și precizia, făcându-le ideale pentru lucruri precum linia de asamblare. Dar ele nu sunt atât de universale.
Roboții moi sunt diferiți de cei industriali sauroboți colaborativi prin faptul că construcția lor este realizată din materiale moi, flexibile. Designul lor este foarte diferit de orice altă formă de roboți, iar roboții similari moale îndeplinesc funcții foarte diferite.
Majoritatea roboților moi sunt încă înăuntruîn stadiile incipiente ale dezvoltării și primul robot moale a fost dezvoltat în 2011 de către profesorul de la Harvard George Whitesides. De atunci, numărul și tipurile de roboți soft au crescut dramatic. Deși pot fi la câțiva ani distanță de viabilitatea lor comercială reală, ele reprezintă totuși o tehnologie interesantă cu un potențial mare.
Roboți moi - o inovație interesantă în lumerobotică. Cele cinci tipuri de roboți soft de mai sus pot avea cel mai mare potențial comercial dintre toate tipurile de roboți soft care sunt în curs de dezvoltare.
Spre deosebire de roboții industriali sau colaborativi, roboții soft servesc o mare varietate de aplicații.
Cum se utilizează roboții moi?
Apelul roboților soft constă în flexibilitatea și versatilitatea lor.
6 tipuri promițătoare de roboți moi
Există multe tipuri diferite de roboți soft, dar există 6 aplicații diferite care promit cel mai mare potențial comercial.
- Mușchii robotici: mai multe tipuri sunt în curs de dezvoltareroboți moi care vor acționa ca mușchi robotici. Unul dintre cele mai promițătoare prototipuri se inspiră din origami. Structura sa pliată poate ridica de 1.000 de ori propria greutate și cântărește de la câțiva milimetri la un metru în lungime.În plus, oamenii de știință lucrează acum la crearea de roboți la scară nanometrică din ADN.
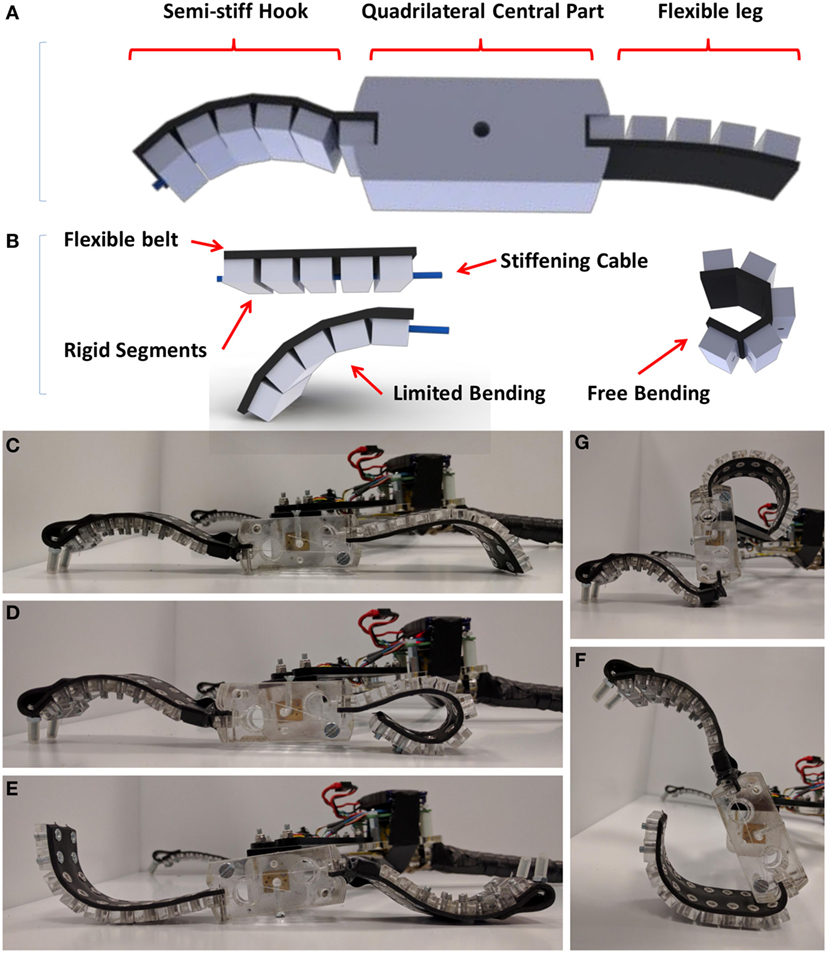
- Roboti de catarare:aceste tipuri de roboți au multe potențialeaplicații variind de la inspecția și întreținerea clădirilor până la operațiunile de căutare și salvare. O versiune a roboților de alpinism moale are un design curbat foarte asemănător cu o omidă. Acest lucru îi permite să se târască în sus și în jos structuri de diferite dimensiuni.
- Roboți comestibili. Primul proiect al unor astfel de roboți creat de echipa școlii din Philadelphia pentru competiția anuală Soft Robotics. Acești roboți biodegradabili pot livra în siguranță medicamente în diferite părți ale corpului.
- Roboți purtabili.Aceste dispozitive biomimetice vă pot ajutaun pacient supus reabilitării fizice. Robotul moale imită mișcarea naturală a corpului oriunde s-ar afla, ajutând pacientul să-și recapete funcția motorie normală.
- Roboți protetici.Roboții moi pot fi folosiți pentru a creaproteze superioare pentru persoanele cărora le lipsesc membre sau părți ale corpului. Adesea, tehnologia robotică moale este folosită la capătul unei mâini protetice pentru a prinde obiectele mai delicat și mai precis.
- Roboți astronauți. Oamenii de știință de la NASA sugerează că într-o zi vor zbura pe suprafața lui Marte. Alții proiectează deja roboți care vor funcționa în părțile cele mai greu accesibile ale corpului uman.
Deși pot fi folosiți și roboți moimedii industriale - mai ales ca roboți colaborativi (cunoscuți și sub denumirea de „cobot”) care lucrează cu oameni, acestea nu se limitează la asta.
Primul robot autonom din lume
În 2016, oamenii de știință de la Harvard au folositcauciuc siliconic lichid pentru dezvoltarea Octobot, primul robot autonom moale din lume. Inspirați de caracatițe, acești roboți moi se pot învârti și depăși obstacole care ar putea să nu fie posibile pentru roboții metalici ascuțiți și rigidi, precum cei descriși în „Terminator” sau „Războiul Stelelor”.
În mod surprinzător, Octobot este mai ieftin de fabricat,decât un latte și costă doar 5 cenți să-l realimentezi. Ne putem imagina sute de roboți soft ieftini care sunt trimiși să investigheze scena, să depășească obstacolele și blocajele pentru a ajuta la operațiunea de salvare.
„Scopul principal al roboticii soft nu este de a creamașini ultra-precise, pentru că le avem deja ", a declarat inginerul biomedical Jada Gerboni în discursul său TED din 2018. „Și să facă roboții capabili să reziste la situații neașteptate din lumea reală”.
Roboți moi în medicină
Roboții moi pot fi folosiți cainstrumente chirurgicale și medicale (în special endoscoape). Avantajul lor este că se deplasează prin structurile corpului mai ușor decât instrumentele tradiționale. Acest lucru oferă medicilor o imagine mai clară a zonei corpului pacientului pe care doresc să o examineze.
Îmbrăcămintea robotică complet moale, care poate ajuta oamenii să se deplaseze, este cu un pas mai aproape de realitate, prin dezvoltarea unui nou sistem de alimentare flexibil și ușor pentru robotica moale.
Descoperire făcută de o echipă din BristolUniversitatea, ar putea deschide calea pentru dispozitive de asistență purtabile pentru persoanele cu dizabilități și cei care suferă de degenerare musculară legată de vârstă. Studiul a fost publicat astăzi înȘtiință robotică.
 Nouă pompă subțire și ușoară pentru cardul de credit. Credit: Tim Helps, Universitatea din Bristol.
Nouă pompă subțire și ușoară pentru cardul de credit. Credit: Tim Helps, Universitatea din Bristol.
Roboții moi sunt confecționați din materiale flexibile,care se poate întinde și răsuci. Aceste materiale pot fi folosite pentru a face mușchi artificiali care se contractă atunci când aerul este pompat în ele. Moliciunea acestor mușchi permite utilizarea îmbrăcămintei de susținere. Cu toate acestea, până în prezent, acești mușchi artificiali pneumatici au fost conduși de pompe electromagnetice convenționale (acționate de motor), care sunt voluminoase, zgomotoase, complexe și costisitoare.
Cercetători la Bristol SoftLabși Laboratorul de robotică Bristol, condus de profesorul de robotică Jonathan Rossiter, au demonstrat cu succes o nouă pompă electro-pneumatică care este moale, flexibilă, ieftină și ușor de fabricat.
În articol, echipa descrie modul în care noul softO pompă de dimensiunea unui card de credit poate conduce mușchii artificiali cu o vezică de aer și pompează lichide. Echipa își prezintă, de asemenea, următorii pași pentru a transforma îmbrăcămintea puternică în realitate.
La fel, polimeri de titan pe bază de carbonpoate fi utilizat în combinație cu polimeri sintetici pentru a crea mușchi artificiali ultra-subțiri. Această tehnologie a fost prezentată în reproduceri de artă de fluturi dansanți, frunze fluturătoare și flori înflorite la Institutul avansat de știință și tehnologie din Coreea.
Cum funcționează roboții soft?
Roboți moi special concepuți pentruimitațiile vieții, trebuie adesea supuse stresului ciclic atunci când se deplasează sau se execută orice altă sarcină. De exemplu, în cazul robotului de tip lamprea sau sepie descris mai sus, ar necesita electroliza apei și aprinderea gazului pentru a se deplasa, rezultând o expansiune rapidă pentru a propulsa robotul înainte. Această expansiune și contracție repetitivă și explozivă va crea o sarcină ciclică intensă pe materialul polimeric selectat. Un robot subacvatic din Europa ar fi aproape imposibil de reparat sau înlocuit, așa că trebuie să aveți grijă să selectați un material și un design care să minimizeze apariția și propagarea fisurilor de oboseală. În special, un material trebuie ales cu o limită de rezistență sau o frecvență de amplitudine a tensiunii peste care caracteristica de oboseală a polimerului nu mai depinde de frecvență.
Deoarece roboții moi sunt fabricați din moalemateriale, trebuie luate în considerare efectele temperaturii. Stresul de producție al unui material tinde să scadă odată cu temperatura, iar în materialele polimerice acest efect este și mai pronunțat. La temperaturi ambientale și mai ridicate, lanțurile lungi din mulți polimeri se pot întinde și aluneca unul lângă celălalt, prevenind concentrația locală de stres într-o zonă și făcând materialul plastic. Dar majoritatea polimerilor suferă o temperatură de tranziție ductilă până la fragilă sub care nu există suficientă energie termică pentru ca lanțurile lungi să reacționeze în acest mod ductil, iar distrugerea este mult mai probabilă. Tendința ca materialele polimerice să devină fragile la temperaturi mai scăzute este considerată a fi cauza dezastrului navetei Challenger și ar trebui luată foarte în serios, în special pentru roboții moi care vor fi introduși în medicină. Temperatura de tranziție ductilă la fragilă nu trebuie să fie ceea ce poate fi considerat „rece” și este de fapt o caracteristică a materialului în sine, în funcție de cristalinitate, rezistență, dimensiunea grupului lateral (în cazul polimerilor) și de alți factori.
Dezavantaje ale tehnologiei
Roboții moi nu sunt lipsiți de dezavantajele lor.Mai exact, oamenii de știință au descoperit că dispozitivele de acționare a fluidelor - dispozitivele care anima de fapt roboții - se pornesc lenți din cauza cantității mari de fluid necesară pentru mișcare sau pentru că fluxul lor este încetinit de diferite structuri din interiorul dispozitivului (cum ar fi tuburile și supapele). ). .
Cu toate acestea, cercetătorii de la Harvard se dezvoltăsoluție. Observând că îndoirea unor astfel de jucării eliberează multă energie, proiectează actuatoare cu două capace glisabile, unul în interiorul celuilalt. Când capacul exterior este umflat, presiunea crește asupra capacului interior. Când se îndoaie, eliberarea de energie pune dispozitivul în mișcare.
Roboții moi au un potențial carese extinde pe Marte și înapoi și vor deveni fără îndoială o mare parte a societății în următorii ani. Capacitățile lor sunt limitate doar de imaginația umană.
Roboți moi și oameni
Roboții cu corp moale oferă posibilitateainteracțiuni sociale și tactile între oameni și roboți, care necesită o analiză atentă a posibilității atașamentelor emoționale inadecvate și a comportamentului personal și social distructiv al utilizatorilor. Problemele etice legate de interacțiunea om-robot și modul în care acestea ar trebui să contribuie la proiectarea roboticii soft în contextul interacțiunii sociale sunt discutate într-un articol pentru revista Soft Robotics.
Thomas Arnold și Matthias Schoitz, Universitatea Tufts,Medford, Massachusetts, a fost co-autor al unui articol intitulat „Etica tactilă a roboticii moi: design inteligent pentru interacțiunea om-robot”. Ei explorează o gamă largă de subiecte, inclusiv capacitatea roboților moi de a atinge și interacționa cu mediul lor, riscurile potențiale ale formării conexiunilor emoționale umane unidirecționale cu roboții și pentru ce roboți sociali ar trebui proiectați. Pentru a ilustra unele dintre problemele etice asociate cu robotica moale și riscurile potențiale pentru societate, autorii discută exemplul roboților sexuali.
Arnold și Schoitz sugerează trei comuneprincipiul dezvoltării roboticii moi în contextul unei persoane sociale și a unui robot. Ei încurajează comunitatea de robotică soft să abordeze aceste probleme etice ca o modalitate de a îmbunătăți calitatea și eficiența interacțiunii om-robot. „Tehnologia robotului moale ne va aduce în curând mașini care interacționează direct cu oamenii; este important să începem să ne gândim la impactul pe care îl pot avea asupra situațiilor sociale. Această lucrare subliniază unele dintre provocările majore și oferă îndrumări excelente pentru discuții serioase despre relația om-robot ”, conchide Barry A. Trimmer, Ph.D., care conduce Laboratorul de dispozitive neuromecanice și biomimetice de la Universitatea Tufts din Medford, Massachusetts .
Citește și
A fost creată prima hartă exactă a lumii. Ce este în neregulă cu toți ceilalți?
Uită-te la fotografiile Hubble ale nebuloaselor planetare.
Fizicienii au creat un analog al unei găuri negre și au confirmat teoria lui Hawking. Unde duce?