Inginerii dezvoltă un braț robotic care va colecta mostre colectate de rover de pe Marte.
Arhitectura manipulatorului imită umanulbrațul cu umărul, cotul și încheietura mâinii. În plus, robotul are propriul „creier” și „ochi” încorporați. ESA raportează că brațul poate efectua o gamă largă de mișcări cu șapte grade de libertate. Un nivel ridicat de dexteritate va permite mâinii să scoată tuburile din rover, să le ridice de pe pământul marțian, să le introducă în container și să închidă capacul înainte de a lansa de pe Marte.
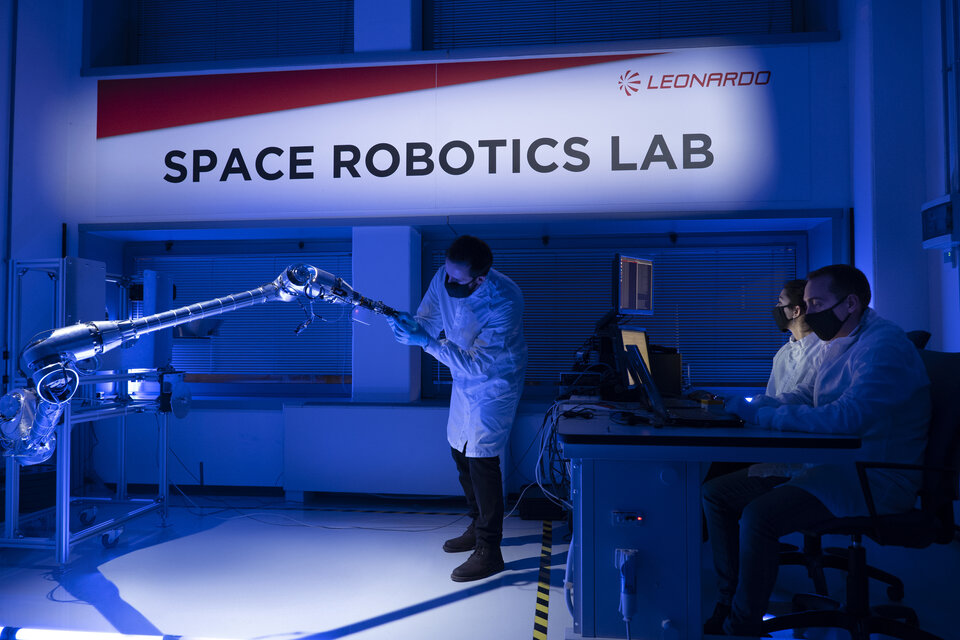 Braț robotic pentru misiunea marțiană. Foto: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Braț robotic pentru misiunea marțiană. Foto: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Robotul va fi echipat cu două camere și mulți senzori. Cu aceste dispozitive, el va fi capabil să determine în mod independent cel mai bun curs de acțiune și să coordoneze mișcările în consecință.
Brațul robotic face parte din misiunea Mars Sample Return. Este format din trei părți și își propune să aducă pe Pământ eșantioane colectate pe Planeta Roșie până în 2033.
 Schema misiunii Mars Sample Return. Imagine: EKA
Schema misiunii Mars Sample Return. Imagine: EKA
După ce roverul colectează probele necesare,se va întoarce pe rampa de lansare. Cu ajutorul unui manipulator, solul colectat va fi încărcat într-un container și ambalat ermetic. Robotul va închide capacul containerului și mostrele marțiane vor fi lansate pe orbită. Acolo vor fi preluați de ESA Earth Return Orbiter (ERO), care va livra materialul înapoi pe Pământ.
Imagine de copertă: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Citeste mai mult:
Fizicienii au găsit un „ceas” universal în spațiu: ele sunt mai precise decât atomice
Arheologii au găsit desene cu oameni înfiorător cu capete uriașe: cine erau
Telescopul James Webb a făcut prima fotografie a lui Jupiter: arată 9 ținte în mișcare simultan