Cine sunt roboții?
În urmă cu câțiva ani, pe Reddit a apărut un lucru grozav - oamenii de știință au descris complex
Robotica este o aplicație sinergicădomeniu de activitate. Constă din programare, mecatronică și cibernetică. Mecatronica este ceva care interacționează cu lumea reală. Iar cibernetica este o știință multi-link, care include, în primul rând, gestionarea programelor create.
Ce este un robot?În urmă cu 15 ani, mulți ar fi spus că acesta este un braț robotic care lucrează într-o fabrică și face sudură sau vopsit. Un alt răspuns popular este robotul Android din lumea filmelor. Dar un cărucior în mișcare sau un vehicul fără pilot este un robot? Da, acesta este și unul dintre domeniile roboticii. Avioanele sunt și roboți, unele dintre cele mai recente dezvoltări includ tehnologii inteligente și sunt, de fapt, roboți autonomi.
 Căruciorul mobil este și un robot
Căruciorul mobil este și un robot
Există, de asemenea, o astfel de zonă a roboticii ca domeniulrobotică – „robotică mobilă”. Aceasta include toți roboții care se mișcă într-un câmp, clădire sau sub apă. Cea mai interesantă aplicație, după părerea mea, este agricultura.
Istoria aeronavei
Istoria aeronavelor a început în trecutsecol. Înainte de asta, zburau doar baloane fără motor și era greu să le numim roboți. La începutul secolului trecut, funcționau două tipuri de avioane - dirijabile și avioane. Primul zbor controlat a fost făcut de frații Wright. Mai mult, primul pilot automat a apărut destul de repede, la aproape 10 ani după aceea, a ajutat la stabilizarea zborului.
Direcția actuală a roboticii este legată dedezvoltarea și disponibilitatea de noi piloți automati deschisi, cum ar fi PixHawk (PixHawk este hardware deschis pentru controlere, drone și alte UAV-uri. Este folosit în scopuri academice, amatoare și profesionale). Un exemplu de sosire a dronelor în viața fiecărei persoane este livrarea de pizza de către compania Dodo Pizza împreună cu Copt Express, asta s-a întâmplat în 2014.
 Istoria aeronavei
Istoria aeronavei
Cum este controlată drona
Avioanele moderne folosesc unuldintre cele trei principii de creare a liftului - aerostatic, jet sau aerodinamic. Principiul aerodinamic al zborului și crearea portanței (aruncarea în jos a unei părți a aerului) poate fi implementat fie datorită mișcării întregului aparat, echipat cu o suprafață portantă fixă (aripă), fie datorită mișcării pieselor de rulment individuale. a aparatului (rotor principal, ventilator) în raport cu aerul.
 Cum zboară dispozitivele
Cum zboară dispozitivele
Drona are o elice care creează portanță.După ce s-a desprins de la sol, dispozitivul începe să miște elicea mai repede și se ridică. Dar forța de acțiune este egală cu forța de reacție. Când elicea se rotește, se creează un moment în direcția opusă - acesta este proiectarea elicopterelor și a elicopterelor. Dacă elicopterul are o elice, acesta nu va fi stabil. Prin urmare, dispozitivul folosește fie o schemă cu două rotoare, fie un rotor de coadă.
Quadcopterul are un design foarte simplu -are de obicei patru șuruburi, dintre care două se rotesc într-o direcție și două în cealaltă direcție. Dacă utilizatorul trebuie să avanseze, unele elice se rotesc mai încet, în timp ce altele se rotesc mai repede. Iar dacă utilizatorul dorește să se întoarcă, atunci unele șuruburi plasate în diagonală accelerează, în timp ce altele încetinesc.
 Cum zboară un quadcopter
Cum zboară un quadcopter
Mișcările elicopterului în colțuri sunt legate de mișcarea de-a lungulcoordonate. Dacă pilotul dorește să avanseze, trebuie să înclinăm mai întâi drona înainte și apoi, pe măsură ce dispozitivul electric trage înainte, să o stabilizăm în punctul în care dorim să rămânem.
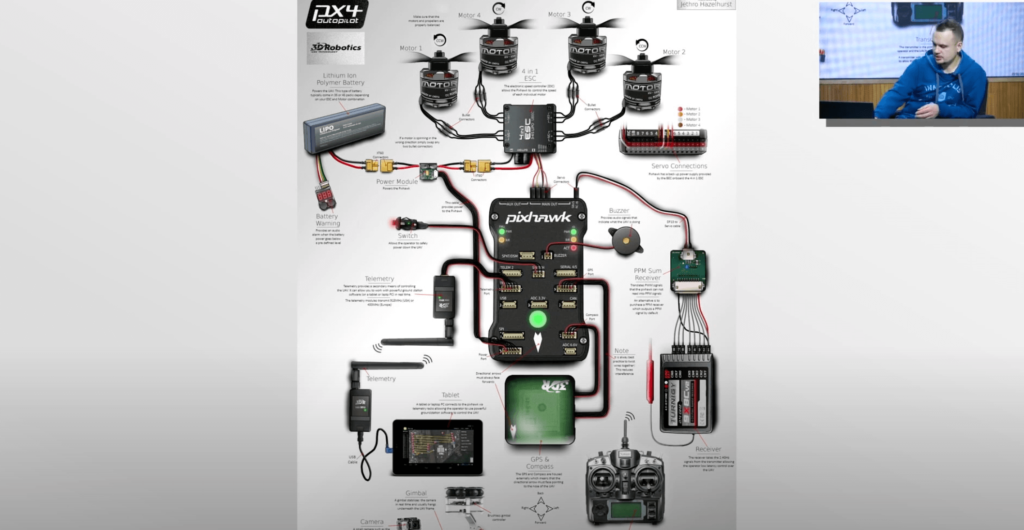
Aceasta este o diagramă a unuia dintre cei mai populari piloți automati,pe baza cărora se pot realiza noi dispozitive. Se conectează la toate motoarele și senzorii. Mai mult, motoarele au propria lor unitate de control, regulatorul ESC - Electronic Speed Controller, care controlează viteza motorului.
Dintre senzori, există GPS pentru ca drona să poatălucrați în aer liber, zburați la puncte și stabilizați poziția. Dar în interiorul autopilotului în sine există și un IMU - un modul senzor inerțial care îi permite să determine unghiurile de atitudine. Există, de asemenea, un canal de comunicație, o stație de control la sol și o baterie.
 Dispozitiv UAV
Dispozitiv UAV
După cum am menționat mai sus, există un nivelcontrolul motorului - noi, fără ezitare, putem seta viteza de rotație. Restul nivelurilor funcționează pe același principiu: următorul este controlul orientării.
Dar mai întâi trebuie să controlăm viteza de rotație- Copterele FPV zboară la acest nivel (dispozitive care vă permit să urmăriți imaginea de la camera dronei în timp real de la prima persoană (FPV - First Person View). Piloții cu experiență setează viteza de rotație și conduc constant cu joystick-ul. Următorul Etapa este atunci când utilizatorul poate stabiliza unghiul, dar drona se va mișca în continuare. Urmează controlul vitezei, iar cel mai înalt este controlul pozițional, manevrele de deplasare într-un punct sau deplasarea de-a lungul unei anumite traiectorii.
Cei care vor să programeze, să construiască șidrone de control - ar trebui să acorde atenție pilotului automat PIX4 open source. Există o întreagă comunitate în jurul roboticii aeriene (ROS – robotic operating system, sau Open robotics), există simulatoare pentru drone. Prin urmare, multe experimente pot fi efectuate în simulator fără a avea drona în sine.
Etapele dezvoltării dronei
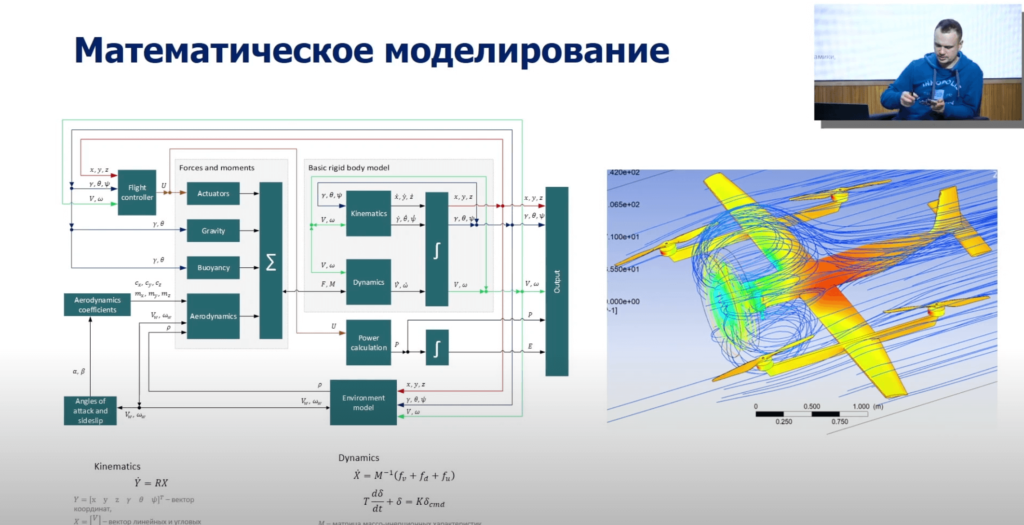
Cercetătorii încep cu un conceptmodelare și apoi trebuie să construiască un model precis al aparatului. Fără a intra în formulă, un model de copter este în esență un model de corp rigid. Aceasta este a doua lege a lui Newton extinsă la sistemele de particule. Are mișcare de translație și rotație, există cinematică și dinamică a mișcării, iar pentru a descrie modelul unui dispozitiv anume trebuie să adăugăm aici ecuația forțelor care acționează asupra unei anumite drone.
 Cum sunt modelate UAV-urile
Cum sunt modelate UAV-urile
Următorul pas este dezvoltarea sistemuluimanagement. Dacă mergem pe calea clasică: mai întâi aflăm modelul matematic exact și, pe baza lui, sintetizăm deja algoritmul de control sau noi formule. Toate nivelurile pot fi incluse în sistemul de control: planificarea mișcării, percepția mediului, estimarea stării cu ajutorul senzorilor. Algoritmii ne permit să ne rafinăm coordonatele și datele.
 Sistem de control al dronei
Sistem de control al dronei
Când există un algoritm de control, acesta poate fi imediataplica, dar este destul de costisitor. Dispozitivele se blochează la cea mai mică eroare - acest lucru trebuie luat în considerare și trebuie făcute copii de rezervă. Pentru testare se folosesc simulatoare.
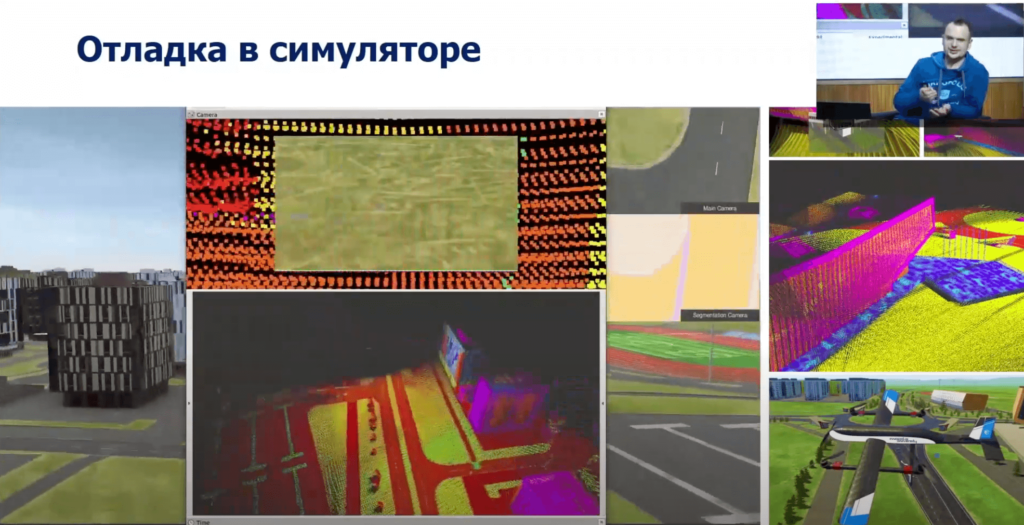
Mai jos este un tur virtual al Innopoliseste un produs al universității noastre, este disponibil pentru descărcare pe GitHub. Aceasta nu este doar o componentă vizuală, ci și datele tuturor senzorilor dispozitivului. Are toți senzorii de poziție, este controlat ca o dronă și poate depana toți algoritmii de control.
 Cum învață dronele în simulare
Cum învață dronele în simulare
Când se bazează pe experiența cu simulatorul aparemai multă încredere - puteți trece la implementarea hardware. Componentele sale sunt prezentate aici: fabricarea dispozitivului din carbon și compozit, crearea electronicii, amplasarea motoarelor, fixarea acestora.
Testele nu încep pe stradă:În primul rând, dispozitivele sunt testate pe o suspensie sau un suport special. Ele pot fi utilizate pentru a depana elemente ale funcționării unui vehicul aerian fără pilot. De exemplu, o aeronavă cu decolare și aterizare verticală este afișată aici - acesta este un hibrid între un aerotermă și un avion; în videoclip puteți vedea cum se descurcă cu perturbațiile externe și cum menține un unghi. În dreapta este un experiment destul de nebunesc în care pornești cinci motoare deodată și vezi cum se descurcă sistemul de control.
 Cum sunt construite dronele
Cum sunt construite dronele
După testare, trec la zboruri -decolări mici la viteze mici, mișcare controlată cu un pilot care poate prelua controlul. Coarda finală este un zbor complet fără pilot.
Aparatul decolează vertical -„ca un copter”, apoi motorul său principal pornește, drona accelerează, trece în modul avion și dezvoltă suficientă viteză pentru ca aripa să funcționeze. Apoi elicele de contur sunt oprite și zboară ca un avion - procesul de aterizare se efectuează în ordine inversă.
Ce se întâmplă cu dronele
Una dintre sarcinile care modernoamenii de știință — ocolind obstacolele în zbor. Unele drone știu deja cum să facă acest lucru, dar sarcina este puțin mai largă - trebuie să înveți dispozitivele să se miște cât mai repede posibil într-un mediu cu obstacole. Și mai este loc de a ne strădui și de a îmbunătăți algoritmii.
Un alt exemplu de astfel de testare este zborul cătrepădure. Există o abordare foarte interesantă - nu doar noi algoritmi sunt utilizați aici, ci și senzori - o cameră pentru evenimente. Aceasta este o cameră cu frecvență foarte înaltă care transmite diferența dintre cadre în fiecare unitate de timp: aceasta vă permite să controlați rapid și să reacționați la obstacole.
În domeniul planificării mișcării dronelor,competiție: cine o va face mai repede. Sarcina este de a mapa o zonă necunoscută, de a construi reprezentarea sa tridimensională, de a găsi obiecte pe ea. Am zburat la universitate, dar am rezolvat și problema găsirii obiectelor. Rezultatele noastre au fost chiar mai bune decât algoritmii cunoscuți.
Există competiții în cursa dronelor.Sunt realizate pe aparate cu camera, cand pilotul are ochelari de protectie si controleaza drona sa zboare prin poarta cat mai repede. Un eveniment destul de spectaculos, în care aceeași sarcină trebuie îndeplinită în modul automat. Din păcate, până acum computerul a reușit să învingă o persoană doar la șah, iar robotul dronă nu a reușit să depășească un pilot uman, deși progresul este deja destul de serios. O dronă cu ajutorul unui algoritm de viziune artificială poate îndeplini astfel de sarcini, munca este doar de a crește viteza.
O altă competiție este Microsoft Games ofdrone, se realizează într-un simulator. În aceeași zonă se desfășoară una dintre celebrele competiții de top din Arabia Saudită. Participanții acolo sunt recrutați cu trei ani în avans.
Dispozitivele fără pilot sunt folosite pentru spectacole cu drone- Sunt evenimente spectaculoase care astăzi au devenit un înlocuitor pentru artificii. Dar aceasta nu este singura utilizare în grup - pot inspecta o zonă mai mare.
Acolo unde se aplică
Ca să nu pară exclusiv științificdezvoltare, mai jos este o demonstrație a dronei Skydio. Acum acesta este cel mai avansat dispozitiv din punct de vedere al autonomiei. Acesta este un exemplu de modul în care tehnologiile moderne - cartografie, evitarea obstacolelor, planificarea traficului sunt utilizate împreună într-un produs deja disponibil utilizatorului.
O altă direcție este noile modeleaeronave. Una dintre ele este dronele pliabile. Un astfel de dispozitiv poate zbura în spații înguste pentru inspecție după un accident. Un alt exemplu este o dronă care se poate desfășura. De exemplu, poate zbura dintr-un tub pneumatic îngust și apoi poate zbura ca de obicei.
Avem și un proiect în acest domeniu – acesta esteмягкий Tensodrone. Это первый дрон мягкой конструкции, который летает. Удовольствие заключается в том, что его можно ронять и он останется целым. Кроме того, можно изменить длины балок, натяжение тросов.
Două exemple care vor prinde viață încurând. În primul rând, livrarea cu drone. Acum există o implementare foarte interesantă în care combinăm un terminal de colete și o stație de aterizare a dronei - în acest caz, nu trebuie să ne îngrijorăm când va sosi drona, unde va ateriza, astfel încât să putem ajunge la ea. timp și ridicați încărcătura înainte de a fi furată. Al doilea exemplu este un taxi zburător. Aceasta este cea mai interesantă zonă de dezvoltare și există deja prototipuri de lucru. Dar acest lucru se va întâmpla abia în următorul deceniu.
Ce evoluții în domeniul taxiurilor zburătoare au apărut în ultimii 6 ani:
- Compania „Hover” a prezentat un dispozitiv cumotor electric cu zgomot redus și dimensiuni compacte - ca o mașină. Decolează la o înălțime de 150 m și aterizează într-un loc de parcare standard. Drona este concepută pentru doi pasageri, sarcina maximă este de 300 kg, iar viteza este de 200 km/h.
— În 2016, compania rusă Hoversurfa arătat o hoverbike pe care o poți purta cu tine și o poți decola oricând dintr-un loc de parcare obișnuit din oraș. Atinge viteze de până la 100 km/h, iar înălțimea de ridicare este limitată forțat la 5 metri din motive de siguranță.
— În 2018, dezvoltat de pasagerul AirbusAeronava Alpha One VTOL a urcat la o înălțime de 5 metri și a rămas în aer timp de 53 de secunde. Utilizatorul va putea apela UAV-ul prin intermediul aplicației și va putea ajunge dintr-un punct în altul atât în interiorul orașului, cât și în afara ei.
— În 2020, taxi aerian CityAirbus a făcutprimul zbor gratuit. Testele au avut loc în suburbiile Parisului, orașul Ile-de-France.Aeronava CityAirbus este capabilă să se deplaseze cu viteze de până la 120 km/h pe o distanță de până la 30 km. Greutatea taxiului zburător este de peste 2,2 tone, CityAirbus este echipat cu trei locuri pentru pasageri și un scaun pentru șofer.
- În 2022, startup-ul chinez Pantuo Aviation a introdus T1, un demonstrator de taxi zburător cu o conductă de aer. Va zbura cu viteze de peste 300 km/h și are o autonomie de 250 km.
Citeste mai mult:
Sonda spațială a zburat la 200 km de Mercur. Uite ce a văzut
Oamenii de știință descoperă modul în care vitaminele afectează incidența cancerului
Casca chinezească pentru citirea minții sună un semnal de alarmă atunci când o persoană vede conținut porno