Inžinieri z École Polytechnique Fédérale de Lausanne vyvinuli metódu, ktorá umožňuje robotom
Pristátie ornitoptéry. Video: EPFL
Zdá sa, že pristátie vtáka na konári je jedným z najviacprirodzené procesy. Ale v skutočnosti to vyžaduje mimoriadne presnú rovnováhu medzi časom, silou nárazu, rýchlosťou a presnosťou pohybu, poznamenávajú autori vývoja. Nie je prekvapením, že až doteraz inžinieri neboli schopní reprodukovať tieto pohyby v robotoch.
 Pristávací systém ornitoptér. Obrázok: Raphael Zufferey a kol., Nature Communications
Pristávací systém ornitoptér. Obrázok: Raphael Zufferey a kol., Nature Communications
Výskumníci vyriešili problém presného vyváženiavybavenie ornitoptéry palubným počítačom a navigačným systémom. Využíva externé zdroje na zachytenie pohybu a určenie polohy zariadenia. Príves pazúrovej nohy ornitoptéry bol presne kalibrovaný, aby kompenzoval vibrácie nahor a nadol počas letu, keď sa dron pokúšal chytiť bidielko.

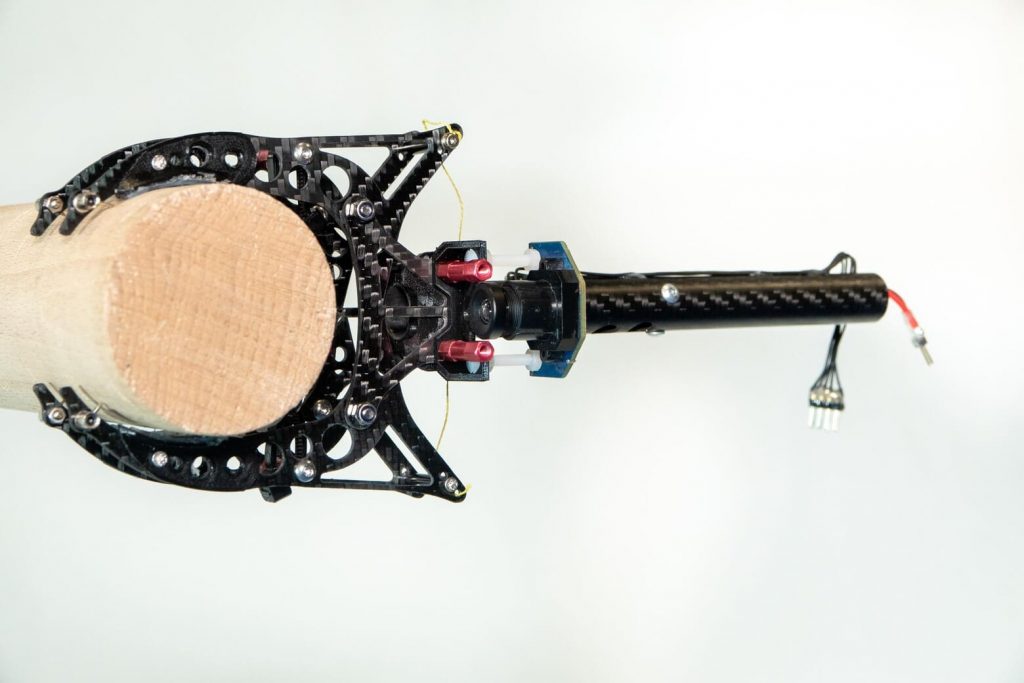
Držiak na ornitoptéru. Obrázok: EPFL
Samotný pazúr bol navrhnutý tak, abyabsorbujú hybnosť pohybu robota pri náraze a rýchlo a bezpečne sa zatvoria, aby uniesli jeho váhu. Keď je robot na posede, zostane na posede bez vynaloženia energie. Výskumníci v súčasnosti vykonávajú letové testy v laboratóriu.
Raz sa ornitoptéra učí samapristane na konári stromu, bude môcť vykonávať určité úlohy, ako napríklad nenápadný zber biologických vzoriek alebo meranie zo stromu. Nakoniec môže dokonca pristáť na umelých štruktúrach, ktoré by mohli otvoriť nové využitie.
Raphael Zufferey, spoluautor vývoja
Čítaj viac:
Neďaleko Zeme sa našli dve planéty. Možno sú obývané
Jedinečný meteor prepísal históriu slnečnej sústavy: odkiaľ prišiel
Prototyp modulu novej ISS bol vyhodený do vzduchu v centre NASA. Pozrite sa, aké to bolo