Profesor Edward Anderson z Massachusettského technologického inštitútu a jeho postgraduálna študentka Sandra Liu
Rukoväť pozostáva z dvoch pružných rebrovaných prstov,ktoré sa prispôsobia tvaru predmetu, s ktorým sú v kontakte. Tieto prsty, ako v mnohých podobných vývojoch, sú vyrobené z flexibilných plastových materiálov na 3D tlačiarni. Inžinieri však vo svojom robote odstránili priečne rebrá umiestnené na vnútornej strane prstov a dodali im tuhosť. Namiesto toho vedci nainštalovali kameru a senzory.
Tenkýakrylová fólia, ku ktorej sú pripevnené „citlivé“ silikónové gélové podložky. Hlboko v dutine je umiestnená kamera, nasmerovaná na akrylovú vrstvu a celá dutina je osvetlená LED diódami.
Pri dotyku s predmetom sa prst jemne obtočíto, splývajúce s obrysmi objektu. Kamera a špeciálne algoritmy analyzujú zmenu silikónových a akrylových dosiek. Na základe analýzy robot určí celkový tvar objektu, nerovnosti povrchu, orientáciu objektu v priestore a silu, ktorou je potrebné objekt stlačiť.
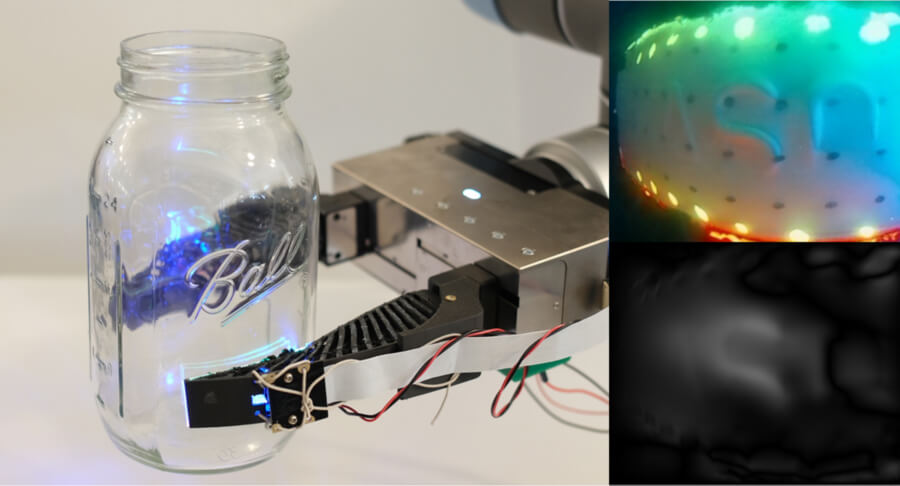
Vedci ich otestovalizachytiť dotykom iba jedného z dvoch prstov. Zariadenie, ktoré vytvorili, úspešne manipulovalo s rôznymi predmetmi, ako je mini skrutkovač, plastová jahoda, tuba s farbou a pohár vína. Zároveň pri snímaní jahôd dokázal vnútorný snímač úspešne rozpoznať zrnitosť jej povrchu a pri práci s téglikom vedel prečítať vyrytý názov.
 Zdroj: MIT Computer Science and Artificial Intelligence Laboratory
Zdroj: MIT Computer Science and Artificial Intelligence Laboratory
Ako poznamenávajú autori práce, sklenené objektypredstavujú výzvu pre senzory počítačového videnia v dôsledku lomu svetla. Hmatové senzory vám umožňujú obísť toto obmedzenie. Keď rukoväť zdvihla pohár, ucítil orientáciu stopky v priestore a mohol sa uistiť, že pohár smeruje nahor, než ho položil na stôl.
Inžinieri poznamenávajú, že vytvorenie dutiny vo vnútriprst mierne narušil stabilitu úchopu. Vedci plánujú dokončiť dizajn svojho zariadenia, aby tento nedostatok napravili. Okrem toho plánujú vyvinúť trojprstový úchop, ktorý dokáže napríklad zbierať kúsky ovocia a vyhodnocovať ich zrelosť.
Čítaj viac:
MIT vytvára stacionárny tepelný motor, ktorý prekonáva turbíny
Po desiatich rokoch práce vedci spochybnili štandardný model fyziky
Pozrite sa, ako vyzerá východ slnka na Marse