Čo sú to mäkké roboty?
Mäkká robotika je špeciálna oblasť robotiky, ktorá sa zaoberá
Mäkká robotika do značnej miery závisí od toho, akoako sa živé organizmy pohybujú a prispôsobujú svojmu prostrediu. Na rozdiel od robotov postavených z tuhých materiálov poskytujú mäkké roboty zvýšenú flexibilitu a prispôsobivosť pri plnení úloh, ako aj zvýšenú bezpečnosť pri práci s ľuďmi. Tieto vlastnosti umožňujú jeho použitie v medicíne a priemysle.
Mäkká robotika hlavne navrhujeroboty vyrobené výlučne z mäkkých materiálov. Výsledkom je, že výsledné roboty pripomínajú bezstavovce, ako sú červy alebo chobotnice. Simulácia pohybu takýchto robotov je náročná úloha. Faktom je, že pre tieto procesy je potrebné použiť metódy mechaniky kontinua. Preto sa mäkkým robotom niekedy hovorí kontinuálne roboty.
Mechanika kontinua je odvetvie mechaniky, fyziky kontinua a fyziky kondenzovaných látok, ktoré sa venuje pohybu plynných, kvapalných a deformovateľných pevných látok, ako aj silovým interakciám v týchto telesách.
Hybridy mäkkých a tvrdých robotov
Na štúdium biologických javov vedci vytvárajú mäkké roboty na obraz živých organizmov a vykonávajú experimenty, ktoré je ťažké vykonať na skutočných organizmoch.
Existujú však tuhé roboty, ktoré sú schopné aj kontinuálnej deformácie, ako napríklad hadí robot.
Mäkké konštrukcie môžu byť použité ako súčasťväčší tuhý robot. Výhodou sú mäkké efektory robota na uchopenie a manipuláciu s predmetmi. Ide o to, že nezničia krehké predmety.
Je tiež možné vytvoriť hybrid soft-hardroboty, ktoré majú vnútorný tuhý rám a vonkajšie mäkké prvky. Mäkké prvky môžu mať mnoho funkcií: oba mechanizmy pôsobenia podobné zvieracím svalom a tlmiaci materiál na zaistenie bezpečnosti pri zrážke s ľuďmi.
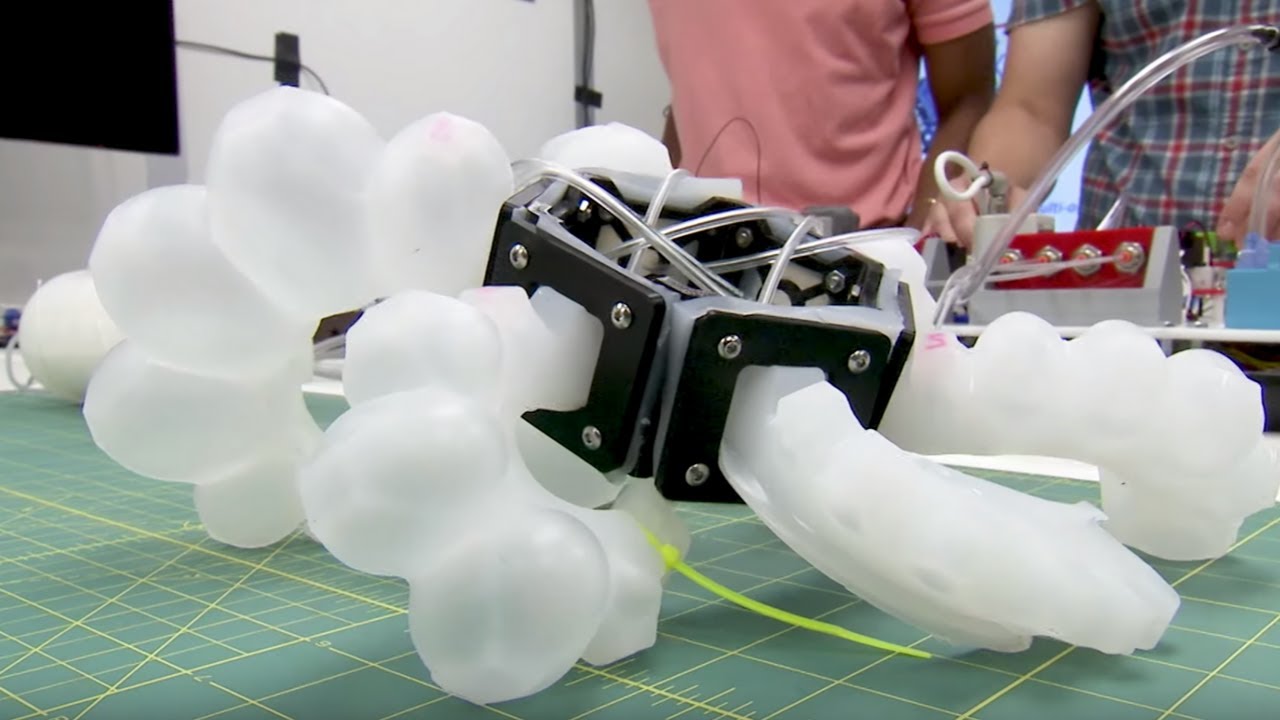
 Robot na kolieskach s mäkkými nohami a schopnosťou pohybovať sa po zemi.
Robot na kolieskach s mäkkými nohami a schopnosťou pohybovať sa po zemi.
Foto: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra a Barbara Mazzolai
Mäkké roboty sa dajú ohýbať do akéhokoľvek tvaruformulár. Sú vyrobené z veľmi mäkkého materiálu vrátane nanomateriálov. Vďaka tomu sa viac podobajú častiam ľudského tela, ako sú svaly. V skutočnosti by sa dalo povedať, že títo roboti takmer ožívajú pomocou nanomateriálov.
Napriek mnohým výskumom v oblasti mäkkých robotov sú inžinieri stále na úplnom začiatku svojej cesty. Odborníci však predpovedajú, že do roku 2024 ich trh dosiahne 2,16 miliardy dolárov.
Ako sa mäkké roboty líšia od bežných robotov?
Kovové roboty sú oveľa obmedzenejšie. Boli navrhnuté s ohľadom na rýchlosť a presnosť, vďaka čomu sú ideálne pre veci, ako je práca na montážnej linke. Ale nie sú všetky také univerzálne.
Mäkké roboty sa líšia od priemyselných respkolaboratívne roboty v tom, že ich konštrukcia je vyrobená z mäkkých, poddajných materiálov. Ich dizajn je veľmi odlišný od akejkoľvek inej formy robotov a podobne mäkké roboty vykonávajú veľmi odlišné funkcie.
Mäkké roboty sú väčšinou stále inv raných fázach vývoja a vôbec prvý mäkký robot vyvinul v roku 2011 harvardský profesor George Whitesides. Odvtedy sa počet a druhy mäkkých robotov dramaticky zvýšili. Aj keď môžu byť niekoľko rokov vzdialení od svojej skutočnej komerčnej životaschopnosti, stále predstavujú vzrušujúcu technológiu s veľkým potenciálom.
Mäkké roboty - vzrušujúca inovácia na sveterobotické. Vyššie uvedených päť typov mäkkých robotov môže mať najväčší komerčný potenciál zo všetkých typov mäkkých robotov, ktoré sa v súčasnosti vyvíjajú.
Na rozdiel od priemyselných alebo kolaboratívnych robotov slúžia mäkké roboty širokému spektru aplikácií.
Ako sa používajú mäkké roboty?
Príťažlivosť mäkkých robotov spočíva v ich flexibilite a všestrannosti.
6 sľubných typov mäkkých robotov
Existuje mnoho rôznych typov mäkkých robotov, ale existuje 6 rôznych aplikácií, ktoré sľubujú najväčší komerčný potenciál.
- Robotické svaly: V súčasnosti sa vyvíja niekoľko typovmäkké roboty, ktoré budú pôsobiť ako robotické svaly. Jeden z najsľubnejších prototypov sa inšpiruje origami. Jeho poskladaná konštrukcia dokáže zdvihnúť 1000-násobok svojej vlastnej hmotnosti a má dĺžku od niekoľkých milimetrov po meter Okrem toho vedci teraz pracujú na vytvorení robotov v nanometroch z DNA.
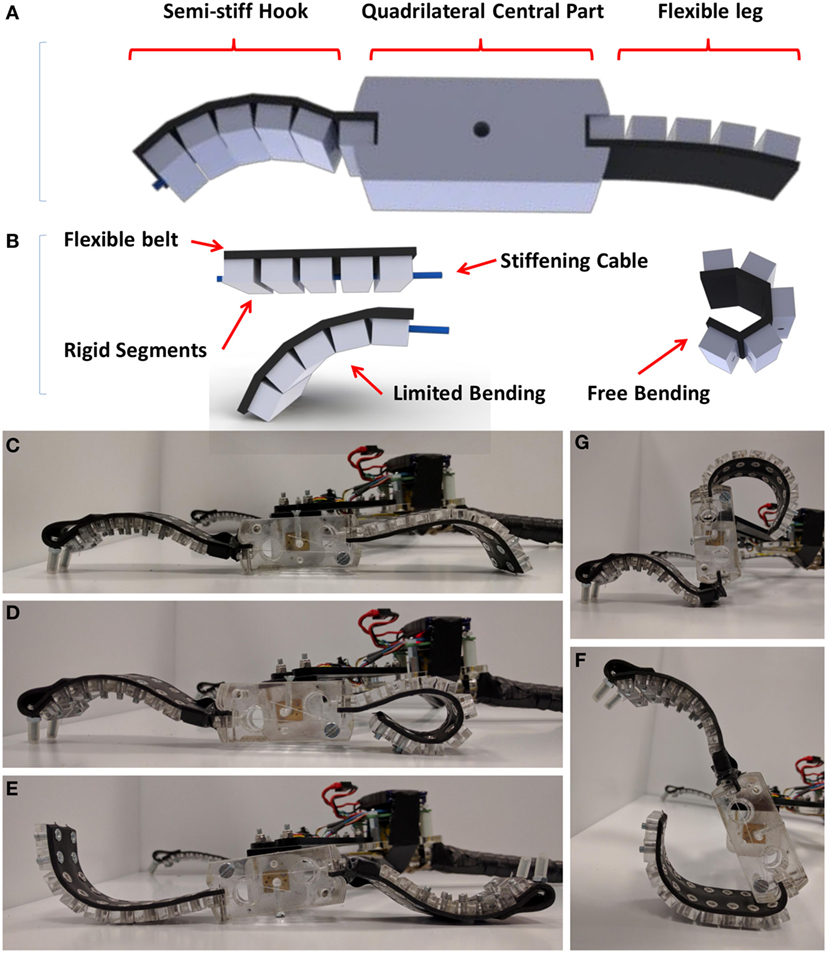
- Horolezecké roboty:у этих типов роботов есть много потенциальные aplikácie od inšpekcie a údržby budov až po pátracie a záchranné operácie. Jedna verzia mäkkých lezeckých robotov má zakrivený dizajn, podobne ako húsenica. To mu umožňuje plaziť sa hore a dole po štruktúrach rôznych veľkostí.
- Jedlé roboty. Prvý projekt takýchto robotov vytvorený školským tímom vo Philadelphii pre každoročnú súťaž Soft Robotics. Tieto biologicky odbúrateľné roboty môžu bezpečne dodávať lieky do rôznych častí tela.
- Nositeľné roboty.Tieto biomimetické zariadenia môžu pomôcťpacient podstupujúci telesnú rehabilitáciu. Mäkký robot napodobňuje prirodzený pohyb tela, nech je kdekoľvek, a pomáha pacientovi obnoviť normálnu motorickú funkciu.
- Protetické roboty.Na tvorbu sa dajú použiť mäkké robotyšpičková protetika pre ľudí, ktorým chýbajú končatiny alebo časti tela. Na jemnejšie a presnejšie uchopenie predmetov sa často používa technológia mäkkej robotiky na konci protetickej ruky.
- Astronautové roboty. Vedci z NASA naznačujú, že jedného dňa budú lietať na povrchu Marsu. Iní už navrhujú roboty, ktoré budú pracovať v najťažšie dostupných častiach ľudského tela.
Aj keď mäkké roboty je možné použiť aj vpriemyselné prostredie - najmä ako kolaboratívni roboti (tiež známi ako „coboti“) pracujúci s ľuďmi, takmer sa tam nezastavia.
Prvý mäkký autonómny robot na svete
V roku 2016 použili vedci z Harvardutekutá silikónová guma pre vývoj Octobota, prvého mäkkého autonómneho robota na svete. Tieto mäkké roboty, inšpirované chobotnicami, sa dokážu otáčať a prekonávať prekážky, ktoré by nemuseli byť možné pre ostrých, pevných kovových robotov, ako sú tí, ktorí sú vyobrazení v „Terminátorovi“ alebo „Hviezdnych vojnách“.
Prekvapivo je výroba Octobotu lacnejšia,než latte, a jeho tankovanie stojí iba 5 centov. Možno si predstaviť, že na pomoc pri záchrannej operácii budú vyslané stovky lacných mäkkých robotov, aby preskúmali scénu, prekonali prekážky a úzke miesta.
„Hlavným cieľom mäkkej robotiky nie je vytváraťultrapresné stroje, pretože ich už máme, “uviedla biomedicínska inžinierka Jada Gerboni vo svojom vystúpení na TED v roku 2018. „A aby roboti dokázali odolať neočakávaným situáciám v reálnom svete.“
Mäkké roboty v medicíne
Mäkké roboty je možné použiť akochirurgické a lekárske nástroje (najmä endoskopy). Ich výhodou je, že sa pohybujú telesnými štruktúrami jednoduchšie, ako to dokážu tradičné nástroje. Lekári tak získajú jasnejší obraz o oblasti tela pacienta, ktorú chcú vyšetriť.
Plne mäkké robotické oblečenie, ktoré môže ľuďom pomôcť pri pohybe, je o krok bližšie k realite s vývojom nového flexibilného a ľahkého systému napájania pre mäkkú robotiku.
Objav vykonaný tímom z BristoluUniverzita, by mohla pripraviť cestu pre nositeľné pomocné zariadenia pre ľudí so zdravotným postihnutím a tých, ktorí trpia degeneráciou svalov súvisiacou s vekom. Štúdia bola dnes zverejnená v rVedecká robotika,
 Nová tenká a ľahká pumpa veľkosti kreditnej karty. Zápočet: Tim Helps, University of Bristol.
Nová tenká a ľahká pumpa veľkosti kreditnej karty. Zápočet: Tim Helps, University of Bristol.
Mäkké roboty sú vyrobené z poddajných materiálov,ktoré sa môžu roztiahnuť a skrútiť. Tieto materiály je možné použiť na výrobu umelých svalov, ktoré sa sťahujú, keď je do nich pumpovaný vzduch. Mäkkosť týchto svalov umožňuje použitie podporného oblečenia. Doteraz však boli tieto pneumatické umelé svaly poháňané konvenčnými elektromagnetickými (motorom poháňanými) pumpami, ktoré sú objemné, hlučné, zložité a drahé.
Vedci z Bristol SoftLaba Laboratórium robotiky Bristol pod vedením profesora robotiky Jonathana Rossitera úspešne predviedli nové elektropneumatické čerpadlo, ktoré je mäkké, flexibilné, lacné a ľahko sa vyrába.
V článku tím popisuje, ako nový softPumpa veľkosti kreditnej karty dokáže poháňať umelé svaly vzduchovým mechúrom a pumpovať tekutiny. Tím tiež načrtáva ich ďalšie kroky k tomu, aby sa silné oblečenie stalo realitou.
Rovnako tak titánové polyméry na báze uhlíkamôže byť použitý v kombinácii so syntetickými polymérmi na vytvorenie ultratenkých umelých svalov. Táto technológia bola demonštrovaná na umeleckých reprodukciách tancujúcich motýľov, vlajúcich listov a kvitnúcich kvetov na Kórejskom pokročilom inštitúte vedy a technológie.
Ako fungujú mäkké roboty?
Mäkké roboty špeciálne navrhnuté prenapodobeniny života, často musia zažiť cyklický stres pri pohybe alebo pri vykonávaní akejkoľvek inej úlohy. Napríklad v prípade vyššie opísaného robota lampáša alebo sépie by to vyžadovalo elektrolýzu vody a zapálenie plynu, čo by viedlo k rýchlej expanzii, ktorá by robota poháňala dopredu. Táto opakujúca sa a výbušná expanzia a kontrakcia spôsobí intenzívne cyklické zaťaženie vybraného polymérneho materiálu. Robota pod vodou v Európe by bolo takmer nemožné opraviť alebo vymeniť, preto je potrebné venovať pozornosť výberu materiálu a konštrukcie, ktoré minimalizujú výskyt a šírenie únavových trhlín. Zvlášť by mal byť zvolený materiál s hranicou trvanlivosti alebo frekvenciou amplitúdy napätia, nad ktorou už únavová charakteristika polyméru nezávisí od frekvencie.
Pretože mäkké roboty sú vyrobené z mäkkéhomateriály, treba brať do úvahy teplotné vplyvy. Medza klzu materiálu má tendenciu klesať s teplotou a v polymérnych materiáloch je tento účinok ešte výraznejší. Pri izbovej a vyššej teplote sa dlhé reťazce v mnohých polyméroch môžu napínať a kĺzať po sebe, čím sa zabráni lokálnej koncentrácii napätia v jednej oblasti a materiál sa stane plastovým. Väčšina polymérov však podlieha teplotám prechodu z krehkého na krehký, pod ktorými nie je dostatok tepelnej energie na to, aby dlhé reťazce reagovali týmto tvárnym spôsobom, a zničenie je oveľa pravdepodobnejšie. Verí sa, že tendencia polymérnych materiálov krehnúť pri nižších teplotách je príčinou katastrofy raketoplánu Challenger a mala by sa brať veľmi vážne, najmä pre mäkké roboty, ktoré budú zavedené do medicíny. Teplota prechodu z tvárnej do krehkej nemusí byť to, čo je možné považovať za „studené“, a v skutočnosti je to vlastnosť samotného materiálu v závislosti od jeho kryštalinity, húževnatosti, veľkosti bočnej skupiny (v prípade polymérov) a ďalších faktorov. .
Nevýhody technológie
Mäkké roboty nie sú bez svojich nevýhod.Vedci konkrétne zistili, že akčné členy tekutín – zariadenia, ktoré v skutočnosti animujú roboty – sa pomaly zapínajú kvôli veľkému množstvu tekutiny potrebnému na pohyb, alebo preto, že ich prietok spomaľujú rôzne štruktúry v zariadení (ako sú rúrky a ventily). .
Vedci z Harvardu sa však vyvíjajúriešenie. Berúc na vedomie, že ohýbaním takýchto hračiek sa uvoľňuje veľa energie, navrhli ovládače s dvoma výsuvnými krytmi, jeden vo vnútri druhého. Keď je vonkajší uzáver nafúknutý, na vnútornom viečku sa vytvára tlak. Keď sa ohne, uvoľnenie energie uvedie zariadenie do pohybu.
Mäkké roboty to majú potenciálsiaha na Mars a späť a nepochybne sa v nasledujúcich rokoch stanú veľkou súčasťou spoločnosti. Ich schopnosti sú obmedzené iba ľudskou predstavivosťou.
Mäkkí roboti a ľudia
Roboty s mäkkým telom ponúkajú príležitosťsociálne a hmatové interakcie medzi ľuďmi a robotmi, ktoré vyžadujú starostlivé zváženie možnosti neprimeraných citových pripútaností, ako aj osobné a sociálne deštruktívne správanie používateľov. Etické otázky súvisiace s interakciou človek-robot a ako by mali prispieť k návrhu mäkkej robotiky v kontexte sociálnej interakcie sú prediskutované v článku pre časopis Soft Robotics.
Thomas Arnold a Matthias Schoitz, Tuftsova univerzita,Medford, Massachusetts, je spoluautorom článku s názvom „Hmatová etika mäkkej robotiky: inteligentný dizajn pre interakciu človek-robot“. Skúmajú širokú škálu tém, vrátane schopnosti mäkkých robotov dotýkať sa ich prostredia a interakcie s nimi, potenciálnych rizík vytvárania jednosmerných emočných spojení medzi ľuďmi a robotov a na čo by mali byť sociálni roboti určení. Na ilustráciu niektorých etických problémov spojených s mäkkou robotikou a potenciálnych rizík pre spoločnosť autori diskutujú o príklade sexuálnych robotov.
Lekári Arnold a Schoitz navrhujú tri spoločnéprincíp rozvoja mäkkej robotiky v kontexte sociálneho človeka a robota. Povzbudzujú komunitu mäkkej robotiky, aby sa zaoberala týmito etickými problémami ako spôsobom zlepšenia kvality a účinnosti interakcie človek-robot. "Technológia mäkkých robotov nám čoskoro prinesie stroje, ktoré interagujú priamo s ľuďmi; je dôležité, aby sme začali premýšľať o vplyve, ktorý môžu mať na sociálne situácie. Tento dokument načrtáva niektoré z kľúčových problémov a poskytuje vynikajúci návod na serióznu diskusiu o vzťahu človek-robot, “uzatvára Barry A. Trimmer, Ph.D., ktorý vedie Laboratórium neuromechaniky a biomimetických zariadení na Tufts University v Medforde, Massachusetts. .
Prečítajte si tiež
Bola vytvorená prvá presná mapa sveta. Čo je zlé na všetkých ostatných?
Pozrite sa na Hubblove fotografie planetárnych hmlovín.
Fyzici vytvorili analóg čiernej diery a potvrdili Hawkingovu teóriu. Kadiaľ vedie?