Názov Dyret (nórsky výraz pre "zviera") je skratka pre dynamického robota pre stelesnené testovanieza
"Ukázali sme výhody bytia."robot môže neustále prispôsobovať tvar svojho tela. Náš robot dokazuje, že sa to dá ľahko dosiahnuť pomocou moderných technológií, “vysvetľuje Tonnes Nygaard, odborný asistent na Katedre informatiky na UiO.
V Dairetovom prípade preformovanie tela znamená, že reguluje dĺžku nôh. Mechanizmus prispôsobenia tvaru tela sa ukázal ako veľmi užitočný pre robota.
Vedci predtým ukázali, že sa ich robot prispôsobujedo rôznych prostredí za kontrolovaných vnútorných podmienok. Nygaard potom strávil šesť mesiacov s inými inžiniermi z organizácie Commonwealth Scientific and Industrial Research Organisation (CSIRO) v Austrálii. Špecializuje sa na vonkajšie testovanie samoučiacich sa robotov.
„Kedysi sa myslelo, že je to príliš ťažkédosah v reálnom svete. S pomocou robotov a našich experimentov sme ukázali, že je to možné,“ vysvetľuje Nygaard v rozhovore pre Titan.uio.no. Výsledky práce boli publikované v časopiseInteligencia prírodného stroja.
Zmenou dĺžky nôh robot dokážeautomaticky zmení tvar tela. Morfologicky adaptívne roboty môžu pracovať v nepredvídateľnom prostredí a čeliť novým výzvam bez toho, aby museli prepracovávať svoju štruktúru alebo prestavovať zakaždým, keď narazia na niečo neočakávané.
Pre ľudí je ťažké si predstaviť, aké ťažké je pre robota presunúť sa napríklad z betónu na trávu. Nezabudnite, že človek má v porovnaní s robotom dlhoročné skúsenosti a pomerne veľa pocitov.
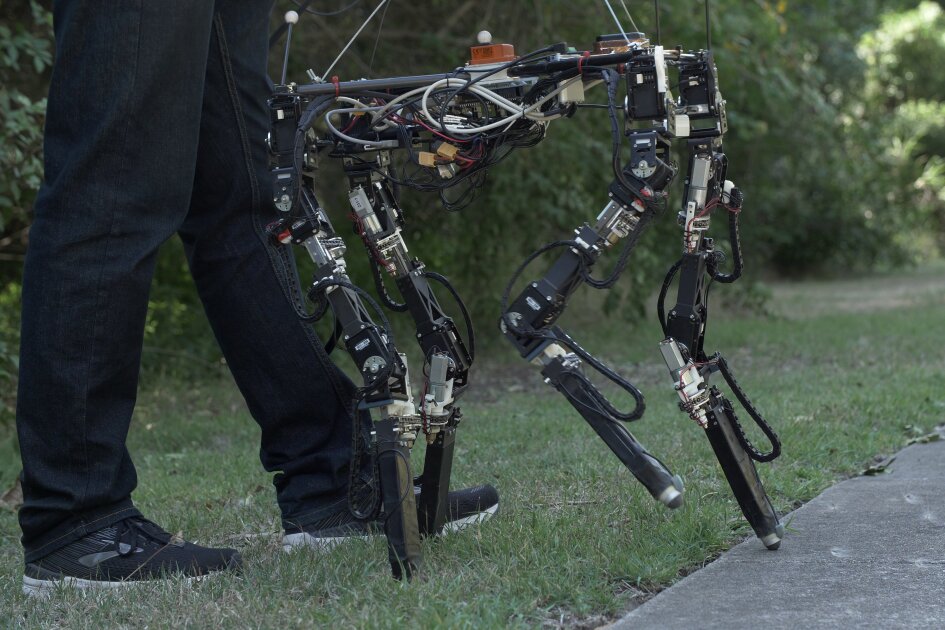 Od trávy k betónu: obrovský skok pre samoučiaceho sa robota. Zápočet: Tønnes Nygaard / UiO.
Od trávy k betónu: obrovský skok pre samoučiaceho sa robota. Zápočet: Tønnes Nygaard / UiO.
"Robot používa kameru, aby videl."nerovný terén a senzory v nohách, ktoré určujú, ako ťažko sa po povrchu chodí, vysvetľuje Nygaard. "Diret sa neustále učí o prostredí, ktorým prechádza, a v kombinácii s poznatkami získanými z interiéru v kontrolovanom prostredí to používa na prispôsobenie svojho tela."
Keď bol Diret požiadaný, aby prešiel po tráve, onnikdy predtým nevidel trávu. Trénoval iba na štrku, piesku a betóne. Rýchlo sa však naučil chodiť po austrálskej tráve a aká bola ideálna dĺžka nohy. Zistilo sa, že kratšie nohy poskytujú robotovi lepšiu stabilitu, zatiaľ čo dlhšie nohy poskytujú vyššiu rýchlosť chôdze, ak je zem dostatočne predvídateľná.
Rovný trávnik nemusí byť najväčšíproblém, ale tráva v prírode je plná chumáčov a dier, ktoré môžu zachytiť robota s dlhými nohami, takže Dairet si skracuje nohy. Na betóne ich dokáže vytiahnuť a „utiecť“.
Robot sa tiež prispôsobí poškodeniu pri náraze na nepredvídané prekážky.
„Pomocou našej technológie to robot dokážeprispôsobiť sa tomu, že jedna z jeho nôh bude slabšia alebo sa zlomí. Môže sa naučiť zotavovať sa krívaním alebo skrátením dĺžky svojich ostatných troch nôh,“ hovorí Nygaard. Poučením sa zo svojich chýb a porúch sa Dayret lepšie prispôsobí svojmu prostrediu.
Kým nebude Dairet pripravená brať to vážneúlohy. Cieľom doktorátu Nygaarda bolo vyvinúť technológiu a nájsť vhodné materiály a dokázať, že sa to dá. Vidí však niekoľko možných budúcich využití. Robot je napríklad užitočný pri pátracích a záchranných operáciách, ako aj v poľnohospodárstve, kde je k dispozícii široká škála náročných povrchov a poveternostných podmienok. Dairet tiež pomôže pri prieskume mín, kam je ťažké sa dostať.
Čítaj viac
Fyzici vytvorili analóg čiernej diery a potvrdili Hawkingovu teóriu. Kadiaľ vedie?
Urán získal status najpodivnejšej planéty v slnečnej sústave. Prečo?
Vedecký prístroj SuperCam od roveru Perseverance posiela prvé výsledky na Zem