Kto sú roboti?
Pred pár rokmi sa na Reddite objavila skvelá vec – vedci opísali komplex
Robotika sa uplatňuje synergickyoblasti činnosti. Pozostáva z programovania, mechatroniky a kybernetiky. Mechatronika je niečo, čo interaguje so skutočným svetom. A kybernetika je multilinková veda, ktorá zahŕňa predovšetkým riadenie vytvorených programov.
čo je robot?Pred 15 rokmi by mnohí povedali, že ide o robotické rameno, ktoré pracuje v továrni a robí zváranie či lakovanie. Ďalšou populárnou odpoveďou je androidový robot z filmového sveta. Je však pohyblivý vozík alebo bezpilotné vozidlo robot? Áno, aj toto je jedna z oblastí robotiky. Lietadlá sú tiež roboty, niektoré z najnovších vývojov zahŕňajú inteligentné technológie a sú to v skutočnosti autonómne roboty.
 Pojazdný vozík je tiež robot
Pojazdný vozík je tiež robot
Existuje aj taká oblasť robotiky ako polerobotika – „mobilná robotika“. Patria sem všetky roboty, ktoré sa pohybujú na poli, v budove alebo pod vodou. Najzaujímavejšou aplikáciou je podľa mňa poľnohospodárstvo.
História lietadiel
História lietadiel sa začala v minulostistoročí. Predtým lietali len balóny bez motora a ťažko ich nazvať robotmi. Začiatkom minulého storočia fungovali dva typy lietadiel – vzducholode a lietadlá. Prvý riadený let uskutočnili bratia Wrightovci. Prvý autopilot sa navyše objavil pomerne rýchlo, takmer 10 rokov na to, pomohol stabilizovať let.
Súčasné smerovanie robotiky súvisí svývoj a dostupnosť nových otvorených autopilotov ako je PixHawk (PixHawk je otvorený hardvér pre ovládače, drony a iné UAV. Používa sa na akademické, amatérske a profesionálne účely). Príkladom príchodu dronov do života každého človeka je rozvoz pizze spoločnosťou Dodo Pizza spolu s Copt Express - stalo sa tak v roku 2014.
 História lietadiel
História lietadiel
Ako sa ovláda dron
Moderné lietadlá používajú jedenz troch princípov vytvárania vztlaku – aerostatického, prúdového alebo aerodynamického. Aerodynamický princíp letu a vytváranie vztlaku (zhadzovanie časti vzduchu) je možné realizovať buď pohybom celého aparátu, vybaveného pevnou nosnou plochou (krídlo), alebo pohybom jednotlivých nosných častí. zariadenia (hlavný rotor, ventilátor) vzhľadom na vzduch.
 Ako zariadenia lietajú
Ako zariadenia lietajú
Dron má vrtuľu, ktorá vytvára vztlak.Keď sa zariadenie odlepí od zeme, začne pohybovať vrtuľou rýchlejšie a zdvihne sa. Ale sila akcie sa rovná sile reakcie. Keď sa vrtuľa otáča, vzniká moment v opačnom smere - to je konštrukcia vrtuľníkov a koptér. Ak má vrtuľník jednu vrtuľu, nebude stabilný. Preto zariadenie používa buď dvojrotorovú schému alebo chvostový rotor.
Kvadrokoptéra má veľmi jednoduchý dizajn -Zvyčajne má štyri skrutky, z ktorých dve sa otáčajú v jednom smere a dve v opačnom smere. Ak sa používateľ potrebuje pohnúť vpred, niektoré vrtule sa otáčajú pomalšie, zatiaľ čo iné sa otáčajú rýchlejšie. A ak sa chce používateľ otočiť, tak niektoré skrutky umiestnené diagonálne zrýchľujú, zatiaľ čo iné spomaľujú.
 Ako lieta kvadrokoptéra
Ako lieta kvadrokoptéra
Pohyby helikoptéry v rohoch súvisia s pohybom pozdĺžsúradnice. Ak sa chce pilot pohnúť vpred, musíme dron najprv nakloniť dopredu a potom, keď sa elektrické zariadenie ťahá dopredu, stabilizovať ho v bode, kde chceme zostať.
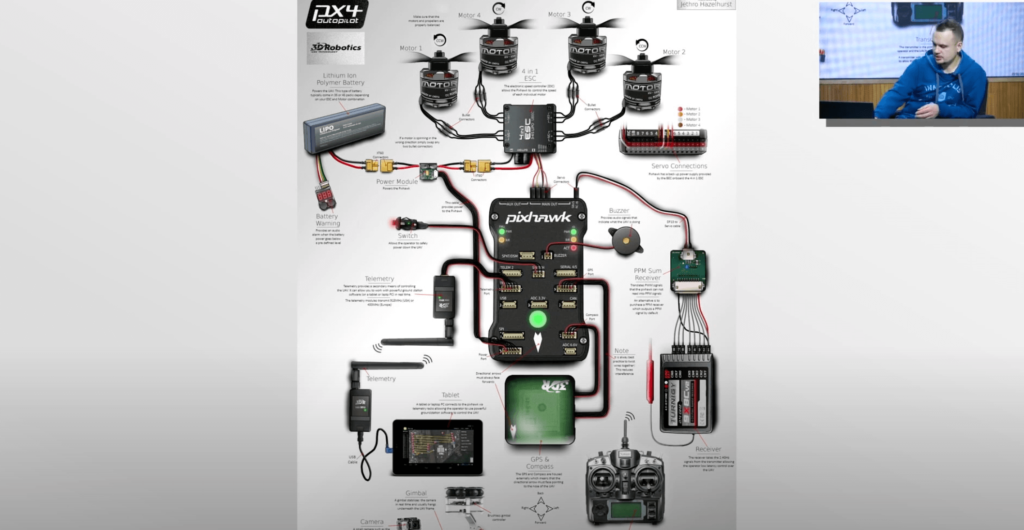
Toto je schéma jedného z najpopulárnejších autopilotov,na základe ktorých sa dajú vyrábať nové zariadenia. Pripája sa ku všetkým motorom a snímačom. Okrem toho majú motory vlastnú riadiacu jednotku, regulátor ESC - Electronic Speed Controller, ktorý riadi rýchlosť motora.
Zo senzorov je tu GPS, aby to dron moholpracujte vonku, lietajte na body a stabilizujte polohu. Vo vnútri samotného autopilota sa však nachádza aj IMU – inerciálny senzorový modul, ktorý mu umožňuje určiť nájazdové uhly. K dispozícii je tiež komunikačný kanál, pozemná riadiaca stanica a batéria.
 UAV zariadenie
UAV zariadenie
Ako je uvedené vyššie, existuje úroveňovládanie motora - bez váhania môžeme nastaviť rýchlosť otáčania. Ostatné úrovne fungujú na rovnakom princípe: ďalšou je kontrola orientácie.
Najprv však musíme ovládať rýchlosť otáčania- FPV helikoptéry lietajú na tejto úrovni (zariadenia, ktoré umožňujú sledovať obraz z kamery dronu v reálnom čase z prvej osoby (FPV - First Person View). Skúsení piloti nastavujú rýchlosť otáčania a neustále riadia pomocou joysticku. Ďalší fáza je, keď používateľ môže stabilizovať uhol, ale dron sa bude stále pohybovať. Ďalej je ovládanie rýchlosti a najvyššie je polohové ovládanie, manévre na presun do bodu alebo pohyb po danej trajektórii.
Tí, ktorí chcú programovať, stavať ariadiace drony - mali by ste venovať pozornosť open source autopilotovi PIX4. Okolo leteckej robotiky je celá komunita (ROS – robotický operačný systém, alebo Open robotics), existujú simulátory pre drony. Mnoho experimentov je preto možné vykonať v simulátore bez toho, aby ste mali k dispozícii samotný dron.
Etapy vývoja dronov
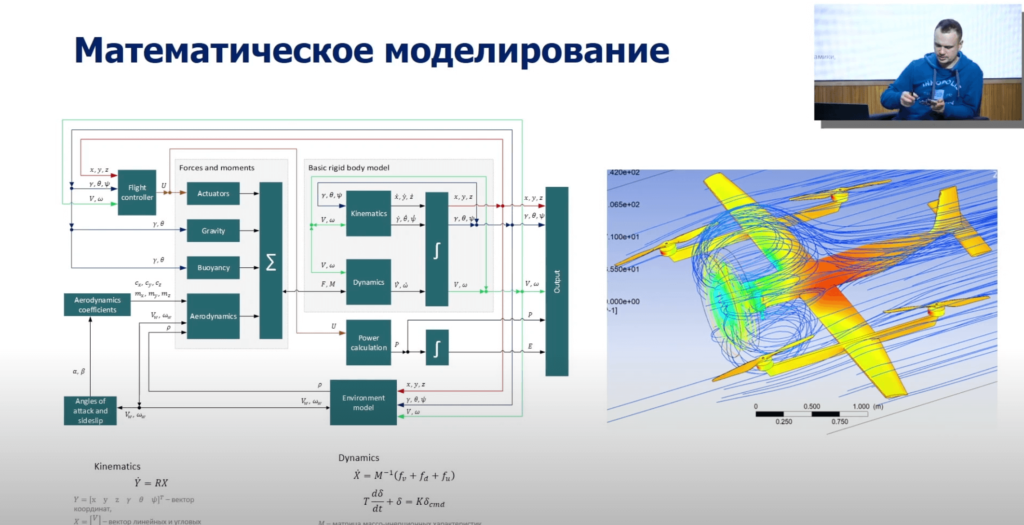
Výskumníci začínajú s koncepčnýmmodelovanie a potom potrebujú zostaviť presný model prístroja. Bez toho, aby sme zachádzali do vzorca, model helikoptéry je v podstate model s pevnou karosériou. Toto je druhý Newtonov zákon rozšírený na systémy častíc. Má translačný a rotačný pohyb, existuje kinematika a dynamika pohybu a aby sme mohli popísať model konkrétneho zariadenia, musíme sem pridať rovnicu síl pôsobiacich na konkrétny dron.
 Ako sa modelujú UAV
Ako sa modelujú UAV
Ďalším krokom je vývoj systémuzvládanie. Ak pôjdeme klasickou cestou: najprv zistíme presný matematický model a na jeho základe už syntetizujeme riadiaci algoritmus alebo nové vzorce. Do riadiaceho systému možno zahrnúť všetky úrovne: plánovanie pohybu, vnímanie prostredia, odhad stavu pomocou senzorov. Algoritmy nám umožňujú spresniť naše súradnice a údaje.
 Riadiaci systém dronov
Riadiaci systém dronov
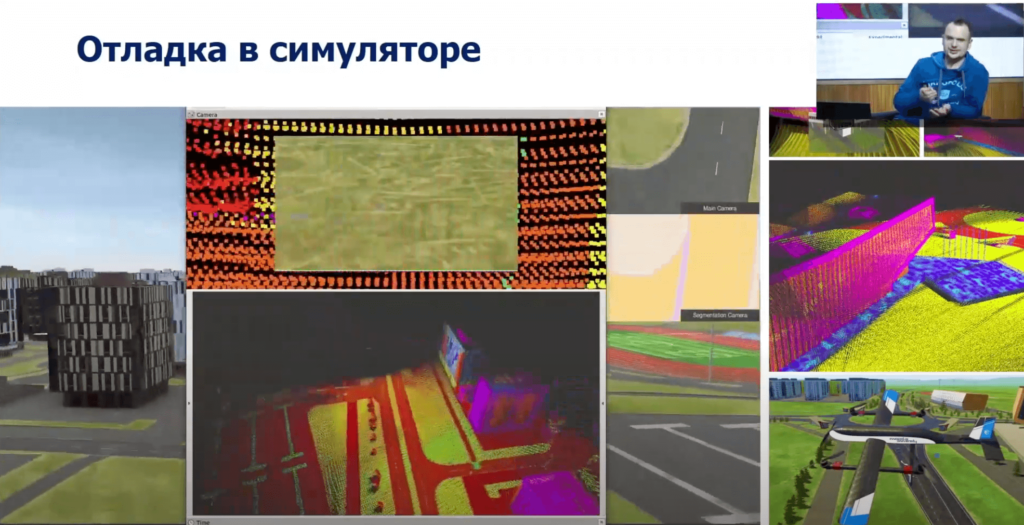
Keď existuje riadiaci algoritmus, môže to byť okamžitepožiadať, ale je to dosť drahé. Zariadenia padajú pri najmenšej chybe - s tým treba počítať a robiť zálohy. Na testovanie sa používajú simulátory.
Nižšie je virtuálna prehliadka Innopolisuje produktom našej univerzity, je k dispozícii na stiahnutie na GitHub. Nejde len o vizuálnu zložku, ale aj o údaje všetkých senzorov zariadenia. Má všetky polohové senzory, ovláda sa ako dron a dokáže odladiť všetky riadiace algoritmy.
 Ako sa drony učia v simulácii
Ako sa drony učia v simulácii
Keď sa na základe skúseností so simulátorom objavíviac dôvery – môžete prejsť k implementácii hardvéru. Sú tu zobrazené jeho komponenty: výroba zariadenia z uhlíka a kompozitu, tvorba elektroniky, umiestnenie motorov, ich upevnenie.
Testy sa nezačínajú na ulici:Najprv sa zariadenia testujú na závese alebo špeciálnom stojane. Môžu byť použité na odladenie prvkov fungovania bezpilotného lietadla. Napríklad je tu znázornené lietadlo s vertikálnym vzletom a pristátím - ide o hybrid vrtuľníka a lietadla na videu môžete vidieť, ako sa vyrovnáva s vonkajšími poruchami a udržiava uhol; Vpravo je dosť šialený experiment, kde naštartujete päť motorov naraz a uvidíte, ako si s tým riadiaci systém poradí.
 Ako sa vyrábajú drony
Ako sa vyrábajú drony
Po testovaní prechádzajú na lety -malé vzlety pri nízkych rýchlostiach, kontrolovaný pohyb s pilotom, ktorý vie prevziať riadenie. Záverečným akordom je úplne bezpilotný let.
Zariadenie vzlieta vertikálne -„ako helikoptéra“, potom sa zapne jeho hlavný motor, dron zrýchli, prepne sa do režimu v lietadle a vyvinie dostatočnú rýchlosť, aby krídlo fungovalo. Potom sa vypnú obrysové vrtule a letí ako lietadlo - proces pristátia prebieha v opačnom poradí.
Čo sa deje s dronmi
Jedna z úloh, ktoré sú modernévedci — obchádzanie prekážok počas letu. Niektoré drony to už vedia, no úloha je trochu širšia – treba naučiť prístroje čo najrýchlejšie sa pohybovať v prostredí s prekážkami. A stále je priestor na snahu a zlepšenie algoritmov.
Ďalším príkladom takéhoto testovania je let doles. Je tu veľmi zaujímavý prístup – sú tu použité nielen nové algoritmy, ale aj senzory – eventová kamera. Jedná sa o veľmi vysokofrekvenčnú kameru, ktorá prenáša rozdiel medzi snímkami v každej jednotke času: to vám umožňuje rýchlo ovládať prekážky a reagovať na ne.
V oblasti plánovania pohybu dronov,konkurencia: kto to urobí rýchlejšie. Úlohou je zmapovať neznámu oblasť, postaviť jej trojrozmerné zobrazenie, nájsť na nej predmety. Lietali sme na univerzite, ale riešili aj problém s hľadaním predmetov. Naše výsledky boli dokonca lepšie ako známe publikované algoritmy.
V pretekoch dronov sa konajú súťaže.Vyrábajú sa na zariadeniach s kamerou, kedy má pilot okuliare a ovláda dron, aby čo najrýchlejšie preletel bránou. Celkom veľkolepá akcia, kde rovnakú úlohu treba vykonať v automatickom režime. Žiaľ, počítaču sa zatiaľ podarilo poraziť človeka len v šachu a robot s dronom nedokázal predbehnúť ľudského pilota, hoci pokrok je už dosť vážny. Dron s pomocou algoritmu strojového videnia môže vykonávať takéto úlohy, úlohou je len zvýšiť rýchlosť.
Ďalšou konkurenciou sú Microsoft Games ofdronov, prebieha na simulátore. V rovnakej oblasti sa koná jedna z najznámejších popredných súťaží v Saudskej Arábii. Účastníci sa tam získavajú na tri roky vopred.
Bezpilotné zariadenia sa používajú na predvádzanie dronov- Sú to veľkolepé podujatia, ktoré sa dnes stali náhradou za ohňostroje. Ale to nie je jediné skupinové využitie – môžu kontrolovať väčšiu plochu.
Kde uplatniť
Aby to nevyzeralo ako výlučne vedeckyvývoj, nižšie je ukážka dronu Skydio. Teraz ide o najpokročilejšie zariadenie z hľadiska autonómie. Toto je príklad toho, ako sa moderné technológie – kartografia, vyhýbanie sa prekážkam, dopravné plánovanie využívajú spolu v produkte, ktorý už má používateľ k dispozícii.
Ďalším smerom sú nové dizajnylietadla. Jedným z nich sú skladacie drony. Jedno takéto zariadenie môže po nehode vletieť do stiesnených priestorov na kontrolu. Ďalším príkladom je dron, ktorý sa dokáže rozvinúť. Môže napríklad vyletieť z úzkej pneumatickej trubice a potom lietať ako obvykle.
Aj v tejto oblasti máme projekt – toto jemäkký Tensodrone. Toto je prvý soft-shell dron, ktorý lieta. Potešením je, že ho môžete zhodiť a zostane neporušený. Okrem toho môžete meniť dĺžku nosníkov, napätie káblov.
Dva príklady, ktoré ožijúčoskoro. Po prvé, doručovanie pomocou dronov. Teraz je tu veľmi zaujímavá implementácia, kde kombinujeme balíkový terminál a pristávaciu stanicu dronu - v tomto prípade sa nemusíme starať o to, kedy dron priletí, kde pristane, aby sme sa k nemu dostali na čas a vyzdvihnúť náklad pred jeho krádežou. Druhým príkladom je lietajúci taxík. Toto je najvzrušujúcejšia oblasť vývoja a už existujú funkčné prototypy. To sa však stane až v nasledujúcom desaťročí.
Aký vývoj v oblasti lietajúcich taxíkov sa objavil za posledných 6 rokov:
- Spoločnosť "Hover" predstavila zariadenie snízkohlučný elektromotor a kompaktné rozmery – ako auto. Štartuje do výšky 150 m a pristáva na štandardnom parkovacom mieste. Dron je určený pre dvoch pasažierov, maximálne užitočné zaťaženie je 300 kg a rýchlosť 200 km/h.
— V roku 2016 ruská spoločnosť Hoversurfukázal vznášadlo, ktoré môžete nosiť so sebou a kedykoľvek vzlietnuť z bežného mestského parkovacieho miesta. Dosahuje rýchlosť až 100 km/h a výška zdvihu je z bezpečnostných dôvodov násilne obmedzená na 5 metrov.
— V roku 2018 vyvinuté cestujúcimi AirbusuLietadlo Alpha One VTOL vyliezlo do výšky 5 metrov a vo vzduchu sa udržalo 53 sekúnd. Používateľ bude môcť prostredníctvom aplikácie zavolať na UAV a dostať sa z jedného bodu do druhého v rámci mesta aj mimo neho.
— V roku 2020 vyrobili aerotaxi CityAirbusprvý voľný let. Testovanie prebiehalo na predmestí Paríža v meste Ile-de-France Lietadlo CityAirbus je schopné pohybu rýchlosťou až 120 km/h na vzdialenosť až 30 km. Hmotnosť lietajúceho taxíka je viac ako 2,2 tony, CityAirbus je vybavený tromi sedadlami pre cestujúcich a jedným sedadlom vodiča.
- V roku 2022 čínsky startup Pantuo Aviation predstavil T1, demonštrátor lietajúceho taxíka so vzduchovým potrubím. Lietať bude rýchlosťou cez 300 km/h a dolet má 250 km.
Čítaj viac:
Vesmírna sonda preletela 200 km od Merkúru. Pozrite sa, čo videl
Vedci odhaľujú, ako vitamíny ovplyvňujú výskyt rakoviny
Čínska prilba na čítanie myšlienok spustí alarm, keď niekto uvidí porno obsah