Истраживачи са Италијанског института за технологију представили су прототип троногог робота који
Роботска платформа МАРМ састоји се одцентрално тело, три крака и посебан уређај за пристајање. Потоњи се користи за пуњење уређаја и размену података. Приликом стварања робота, научници су предвидели могућност рада и у присуству гравитације и у микрогравитацији.
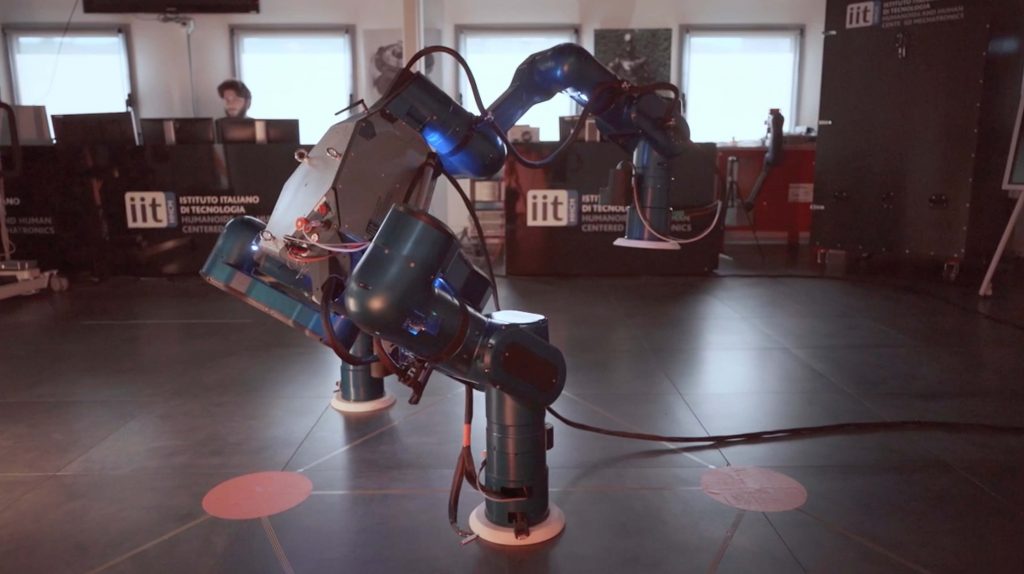
Робот МАРМ. Видео: ИИТ
МАРМ робот може да користи три екстремитетакретање хватањем стандардних интерконеката на површинама станица и пузећи преко њих. Такође може да склапа и позиционира различите компоненте уређаја, као што је померање и инсталирање модуларних шестоугаоних плоча ширине 1,2 м које се користе на ИСС-у, и манипулисање орбиталним додацима.

Робот МАРМ. Фотографије: ИИТ
Конфигурација са три екстремитета - основнаразлика између новог робота и претходних развоја. Ово, према речима инжењера, обезбеђује већу флексибилност у раду уређаја. На пример, може да користи две "руке" за рад, држећи се за површину уз помоћ преостале.
Истраживачи предлажу да се МАРМ користи запокупите робу из складишта, преместите је на право место, сакупите и поставите. Прототип ће бити тестиран у микрогравитацији имајући у виду овај сценарио, након чега ће бити креирана радна верзија која ће бити послата на ИСС.
Опширније:
Научници из зоне пермафроста: како развијају паметну одећу и вакцину против рака
Две планете пронађене су недалеко од Земље. Можда су насељени
Научници су открили ко је имао користи од смрти диносауруса