Аутори новог рада су претпоставили да се модели најбоље обучавају коришћењем предвиђања
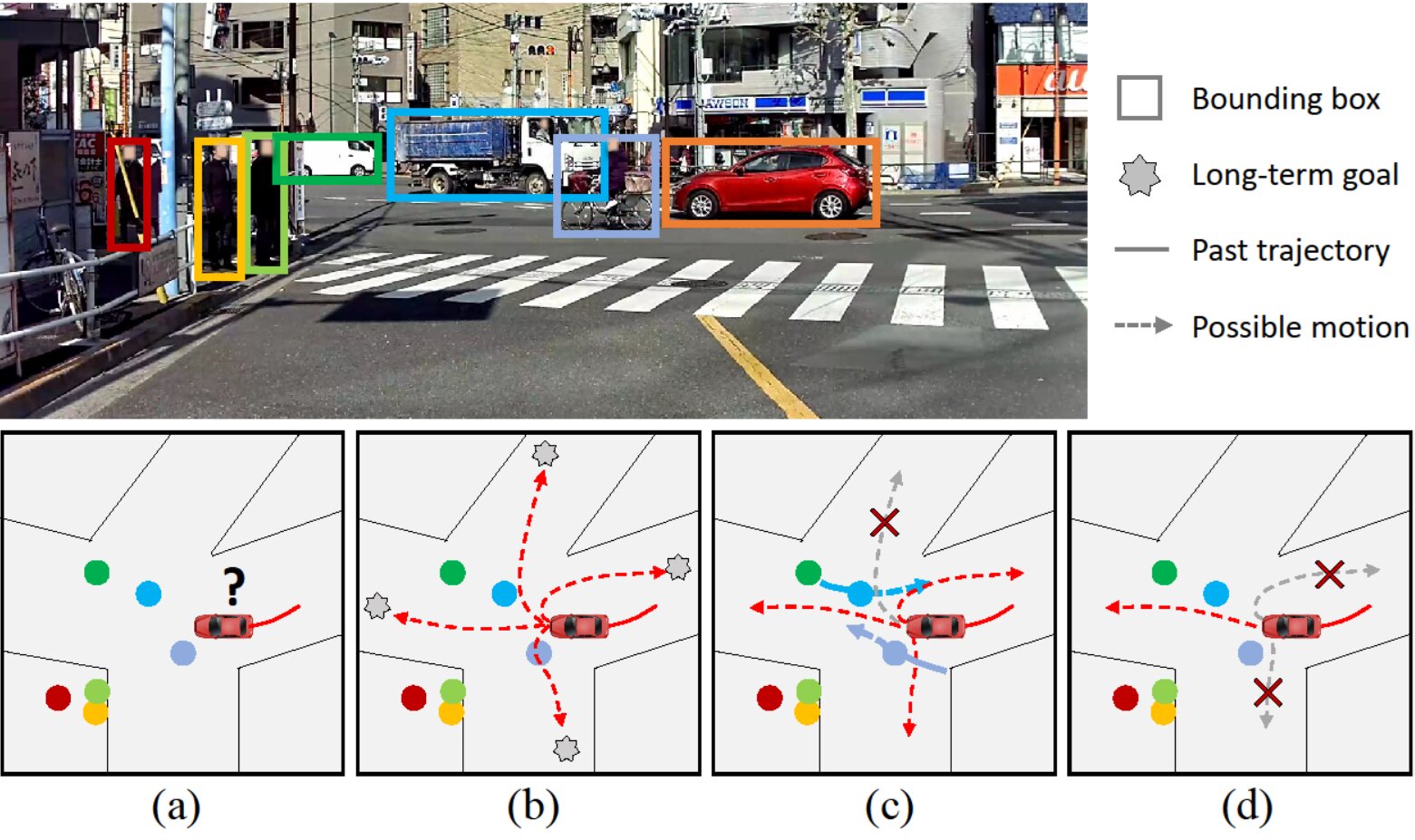
Истраживачи планирају да развију архитектуру која узима у обзир и краткорочне и дугорочне циљеве — ово су главне компоненте приликом процене намера пешака или аутомобила.&нбсп;
На пример, постоји аутомобил који се налази на раскрсницижели да скрене лево. Важно је узети у обзир не само динамику транспорта, већ и то како се намера може променити у зависности од различитих фактора: због сопствене жеље, других учесника у саобраћају или препрека.
Затим, алгоритам прво кодира прошла искуства на којима је модел обучен да предвиди које би могле бити дугорочне и краткорочне последице.&нбсп;
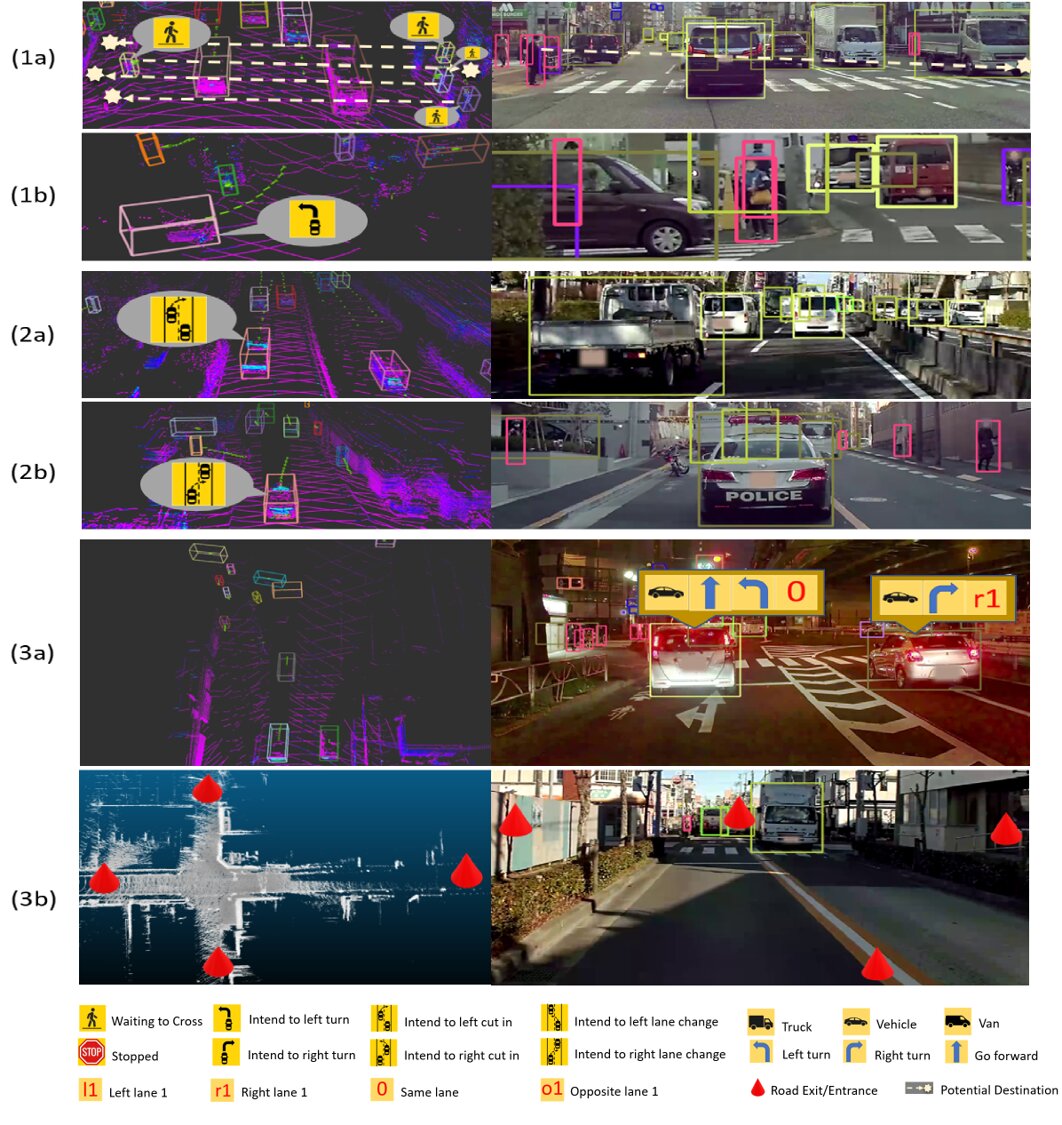
Модел додељује свим околним објектимазнаци су „намере“ које се могу променити на путу, „окружење“ као што су путокази и дрвеће које утичу на намере агената, и „контекстуални знаци“ као што су временске прилике и услови на путу.
Истраживачи су проценили свој модел у низу тестова и открили да је надмашио друге најсавременије методе предвиђања путање за 27%.
Програмери верују да модел може битикористи се за побољшање безбедности и перформанси аутономних возила. Осим тога, друге истраживачке групе могу користити скуп података ЛОКИ за припрему сопствених модела за предвиђање путева пешака и возила на путу.
Читати Даље:
Нови иОС 15: датум изласка, иПхоне дизајн и функције. Ми кажемо све што се зна
Ултра танки материјал направљен је од белог графена. Замениће сервере
Погледајте тешки јуришни дрон који носи тону оружја