Фацебоок ће користити компјутерски вид и системе за обраду природног језика који већ постоје
Планирано је да робот буде потпуно аутономан.и самоучење - системи морају учити директно из сирових података. То ће омогућити да се уређај брже прилагоди новим изазовима и промени околности, сматрају у компанији. Основа вештачке интелигенције ће бити учење засновано на РЛ моделу, који ће омогућити роботима да уче самостално кроз покушаје и грешке.
Волели бисмо да научимо робота да хода без помоћи. Кретање је веома тежак задатак у роботици, што га чини веома узбудљивим, с наше тачке гледишта.
Разработчик Фацебоок Ресеарцх Роберто Цаландра
Карактеристична карактеристика робота са Фацебоокада уређај неће бити имплементиран алгоритмима за његово кретање. У почетку, он не може ходати, међутим, постепено користећи алгоритам учења, он почиње да комуницира са својим контролерима, који већ могу бити активирани за кретање. Што више робота добије, то боље функционише.

У овом случају, робот не само да мораодредите своју локацију и оријентацију у простору, али и задржите равнотежу и повежите импулсе сензора један са другим за исправан рад сложених механизама, као што је колено.
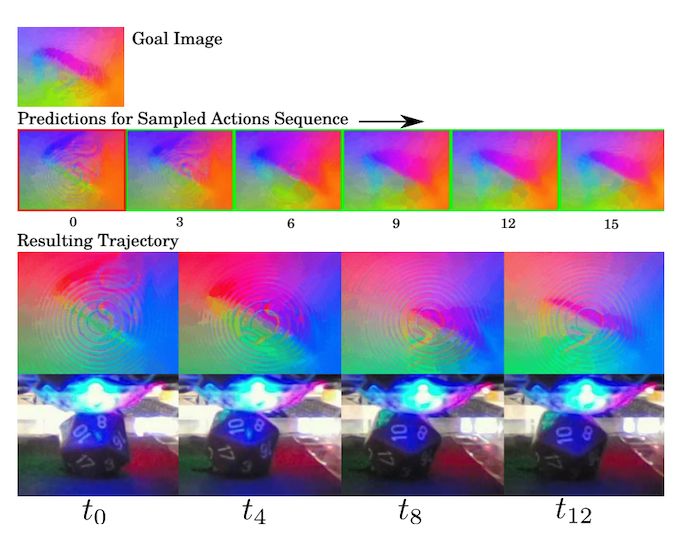
Роботи са Фејсбука за компјутерски видкористите један од алгоритама који су развијени за предвиђање популарности видео записа. Неуронска мрежа може анализирати неколико секунди видеа и предвидети даље кадрове чак и без гледања како би убрзала анализу огромне количине материјала.
Као део експеримента Фацебоок истраживањапредставио први уређај - манипулатор који може радити са џојстиком, котрљати коцку са 20 фасета и исправно разумјети резултате који су пали у секунди или другом.
Комбиновање визуелних и тактилних извора информација може побољшати методе учења и функционалност будућих платформи за самостално учење, наводи Фацебоок.
Према речима програмера, сада сличнопројекти користе само једну врсту (максимално две) информација, док роботски уређаји да би у потпуности функционисали морају да перципирају информације из различитих чула.