Недавно су научници спровели студију која је имала за циљ да реплицира људску способност одређивања
Чланак истиче предности развоја робота који могу да комуницирају са околином додиром, а не само обрадом вида и звука.
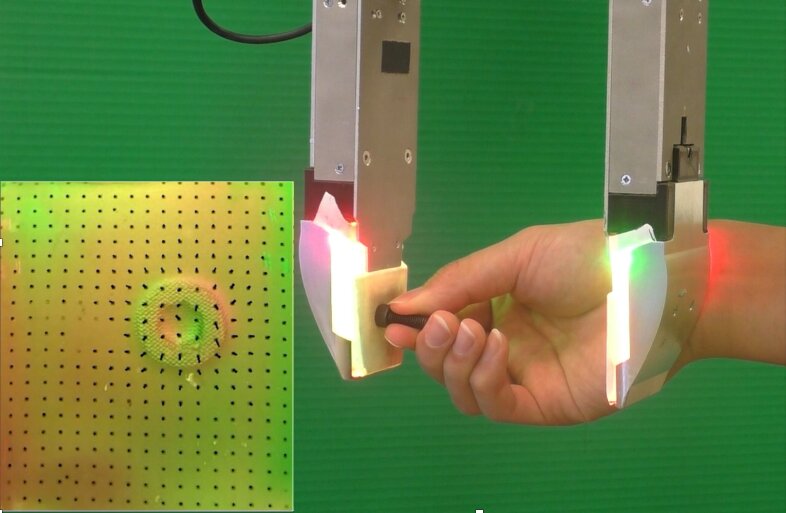
Циљ нашег рада је био да то демонстрирамо саСа тактилним сенсингом високе резолуције, познати објекти се могу прецизно локализовати чак и од првог контакта. Ово је важан напредак у односу на претходни рад на тактилној локализацији, јер се не ослањамо ни на један други начин спољашње перцепције (нпр. вид) или претходно прикупљене тактилне податке повезане са објектима којима се манипулише.&нбсп;
Марија Бауза, један од истраживача
Нова техника учи из симулације и не учизахтева обимно прикупљање података. У почетку су истраживачи развили структуру која симулира контакте између датог објекта и тактилног сензора, под условом да робот има приступ подацима о објекту са којим комуницира (на пример, о његовом тродимензионалном облику, својствима итд.).
Затим су истраживачи користили модернеМетоде машинског учења за компјутерски вид и учење представљања како би се упарили тактилна запажања у стварном свету која је прикупио робот са скупом контаката генерисаних процесом симулације.&нбсп;
У суштини, метод који је развила ова групаистраживачи могу моделирати контакт информације једноставно на основу тродимензионалног облика објекта. Као резултат тога, нису потребни прелиминарни тактилни подаци прикупљени пажљивим проучавањем објекта. Ово омогућава техници да генерише процене положаја за објекат од првог додира роботових тактилних сензора.
Опширније
Земља ће достићи критичну температуру за 20 година
Побачај и наука: шта ће бити са децом која ће се родити
Именована је биљка која се не плаши климатских промена. Храни милијарду људи