Име Дyрет (норвешки за "животињу") је скраћеница за динамичку роботску пробуза
„Показали смо предности постојањаробот може стално прилагођавати облик свог тела. Наш робот доказује да се то лако може учинити савременом технологијом “, објашњава Тоннес Нигаард, виши предавач на Одељењу за рачунарске науке у УиО.
У Даиретовом случају, преобликовање тела значи да он регулише дужину ногу. Механизам прилагођавања облика каросерије показао се као веома користан за робота.
Научници су раније показали да се њихов робот прилагођавау различита окружења у контролисаним унутрашњим условима. Нигаард је затим провео шест месеци са колегама инжењерима у Цоммонвеалтх Сциентифиц Сциентифиц анд Индустриал Ресеарцх Организатион (ЦСИРО) у Аустралији. Специјализована је за тестирање робота за самостално учење на отвореном.
„Раније се мислило да је то претешкодосегнути у стварном свету. Уз помоћ робота и наших експеримената, показали смо да је то могуће“, објашњава Најгард у интервјуу за Титан.уио.но.&нбсп;Резултати рада објављени су у часописуИнтелигенција машине природе.
Променом дужине ногу, робот можеаутоматски мења облик тела. Морфолошки прилагодљиви роботи могу радити у непредвидивим окружењима и суочити се с новим изазовима без потребе за редизајнирањем своје структуре или обновом сваки пут када наиђу на нешто неочекивано.
Људима је тешко замислити колико је тешко роботу да се креће, на пример, са бетона на траву. Не заборавите да особа има дугогодишње искуство и доста осећања у поређењу са роботом.
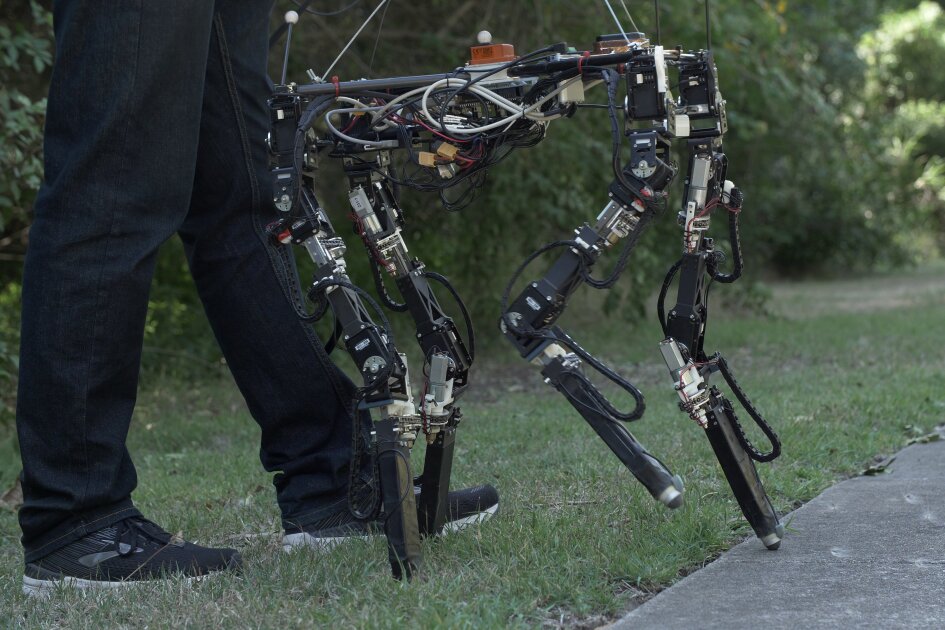 Од траве до бетона: огроман скок за робота који се самоучи. Заслуге: Тøннес Нигаард / УиО.
Од траве до бетона: огроман скок за робота који се самоучи. Заслуге: Тøннес Нигаард / УиО.
„Робот користи камеру да видиколико је терен нераван и сензори у ногама одређују колико је тешко по површини ходати, објашњава Нигаард. "Дирет непрестано учи о окружењу кроз које пролази и, у комбинацији са знањем стеченим у затвореном у контролисаном окружењу, то користи за прилагођавање свог тела."
Када је Дирет замољен да хода по трави, он јеникада раније нисам видео траву. Обучавао је само шљунак, песак и бетон. Међутим, брзо је научио да хода по аустралијској трави и која је идеална дужина ногу. Утврђено је да краће ноге пружају бољу стабилност роботу, док дуже ноге пружају већу брзину ходања ако је тло довољно предвидљиво.
Равни травњак можда није највећипроблем, али трава у природи пуна је чуперака и рупа које могу заробити дугоногог робота, па Даирет скраћује ноге. На бетону их може извући и „побећи“.
Робот се такође прилагођава оштећењима при ударцу у непредвиђене препреке.
„Користећи нашу технологију, робот можеприлагоди се да му једна нога слаби или се ломи. Може да научи да се опоравља шепајући или смањивањем дужине своје друге три ноге“, каже Најгард. Учећи на својим грешкама и кваровима, Дејрет се боље прилагођава свом окружењу.
Све док Даирет није спреман да се уозбиљизадацима. Циљ Нигаард -овог доктората био је развити технологију и пронаћи одговарајуће материјале, те доказати да је то могуће. Међутим, он види неколико могућих будућих употреба. На пример, робот је користан у операцијама трагања и спасавања, као и у пољопривреди, где постоји широк спектар изазовних површина и временских услова. Такође, Даирет ће помоћи у истраживању рудника до којих је тешко доћи.
Опширније
Физичари су створили аналог црне рупе и потврдили Хокингову теорију. Куда води?
Уран је добио статус најчудније планете у Сунчевом систему. Зашто?
Научни инструмент СуперЦам компаније Персеверанце ровер шаље прве резултате на Земљу