Инженеры разрабатывают роботизированную руку, которая заберет с Марса образцы, собранные марсоходом
Архитектура манипулатора опонаша људскуруку са раменом, лактом и зглобом. Поред тога, робот има свој уграђени "мозак" и "очи". ЕСА извештава да рука може да изврши велики опсег покрета са седам степени слободе. Висок ниво спретности ће омогућити руци да уклони цеви из ровера, подигне их са марсовског тла, убаци их у контејнер и затвори поклопац пре лансирања са Марса.
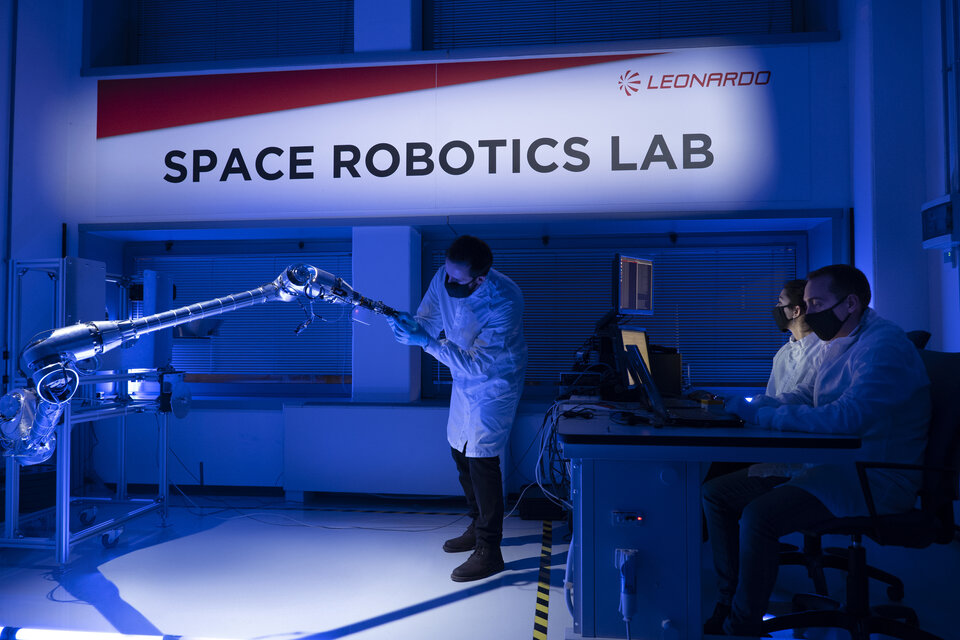 Роботска рука за мисију на Марсу. Фото: Леонардо/Макон/ГМВ/ ОХБ Италиа/ САБ Аероспаце с.р.о.
Роботска рука за мисију на Марсу. Фото: Леонардо/Макон/ГМВ/ ОХБ Италиа/ САБ Аероспаце с.р.о.
Робот ће бити опремљен са две камере и више сензора. Са овим уређајима ће моћи самостално да одреди најбољи ток акције и да у складу са тим координира покрете.
Роботска рука је део мисије Марс Сампле Ретурн. Састоји се из три дела и има за циљ да узорке прикупљене на Црвеној планети донесе на Земљу до 2033. године.
 Шема мисије Марс Сампле Ретурн. Слика: ЕКА
Шема мисије Марс Сампле Ретурн. Слика: ЕКА
Након што ровер прикупи потребне узорке,вратиће се на лансирну рампу. Уз помоћ манипулатора, прикупљено земљиште ће се утоварити у контејнер и херметички затворити. Робот ће затворити поклопац контејнера и марсовски узорци ће бити лансирани у орбиту. Тамо ће их покупити ЕСА Еартх Ретурн Орбитер (ЕРО), који ће доставити материјал назад на Земљу.
Насловна слика: Леонардо/Макон/ГМВ/ ОХБ Италиа/ САБ Аероспаце с.р.о.
Опширније:
Физичари су пронашли универзални "сат" у свемиру: они су тачнији од атомских
Археолози су пронашли цртеже језивих људи са огромним главама: ко су они били
Телескоп Џејмс Веб направио је прву слику Јупитера: приказује 9 покретних циљева одједном