Ко су роботи?
Пре неколико година, на Реддиту се појавила кул ствар - описали су научници комплекс
Роботика је примењена синергијапоље активности. Састоји се од програмирања, мехатронике и кибернетике. Мехатроника је нешто што је у интеракцији са стварним светом. А кибернетика је наука са више веза, која укључује, пре свега, управљање креираним програмима.
Шта је робот?Пре 15 година, многи би рекли да је ово роботска рука која ради у фабрици и ради заваривање или фарбање. Још један популаран одговор је андроид робот из света филма. Али да ли су колица у покрету или возило без посаде робот? Да, ово је такође једна од области роботике. Авиони су такође роботи, неки од најновијих достигнућа укључују интелигентне технологије и заправо су аутономни роботи.
 Мобилна колица су такође робот
Мобилна колица су такође робот
Постоји и област роботике као пољероботика – „мобилна роботика“. Ово укључује све роботе који се крећу у пољу, згради или под водом. Најзанимљивија примена, по мом мишљењу, је пољопривреда.
Историја авиона
Историја авиона почела је у прошлостивека. Пре тога су летели само балони без мотора, а било их је тешко назвати роботима. Почетком прошлог века функционисале су две врсте летелица - ваздушни бродови и авиони. Први контролисани лет извршила су браћа Рајт. Штавише, први аутопилот се појавио прилично брзо, скоро 10 година након тога, помогао је да се стабилизује лет.
Садашњи правац роботике је везан заразвој и доступност нових отворених аутопилота као што је ПикХавк (ПикХавк је отворени хардвер за контролере, дронове и друге беспилотне летелице. Користи се у академске, аматерске и професионалне сврхе). Пример доласка дронова у живот сваког човека је испорука пице компаније Додо Пизза заједно са Цопт Екпресс-ом - то се догодило 2014. године.
 Историја авиона
Историја авиона
Како се контролише дрон
Модерни авиони користе једанод три принципа стварања узгона – аеростатског, млазног или аеродинамичког. Аеродинамички принцип лета и стварање узгона (одбацивање дела ваздуха) може се реализовати или услед кретања целог апарата, опремљеног фиксном носећом површином (крилом), или услед померања појединих носивих делова. апарата (главни ротор, вентилатор) у односу на ваздух.
 Како уређаји лете
Како уређаји лете
Дрон има пропелер који ствара подизање.Скидајући се са земље, уређај почиње брже да помера пропелер и подиже се. Али сила акције је једнака сили реакције. Када се пропелер окреће, ствара се тренутак у супротном смеру - ово је дизајн хеликоптера и хеликоптера. Ако хеликоптер има један пропелер, неће бити стабилан. Дакле, уређај користи или шему са два ротора или репни ротор.
Квадкоптер има веома једноставан дизајн -обично има четири завртња, од којих се два окрећу у једном, а два у другом смеру. Ако корисник треба да се креће напред, неки пропелери се окрећу спорије док се други окрећу брже. А ако корисник жели да се окрене, онда неки завртњи постављени дијагонално убрзавају, док други успоравају.
 Како лети квадрокоптер
Како лети квадрокоптер
Покрети хеликоптера у угловима повезани су са кретањем уздужкоординате. Ако пилот жели да крене напред, треба прво да нагнемо дрон напред, а затим, како електрични уређај повуче напред, да га стабилизујемо на месту где желимо да останемо.&нбсп;
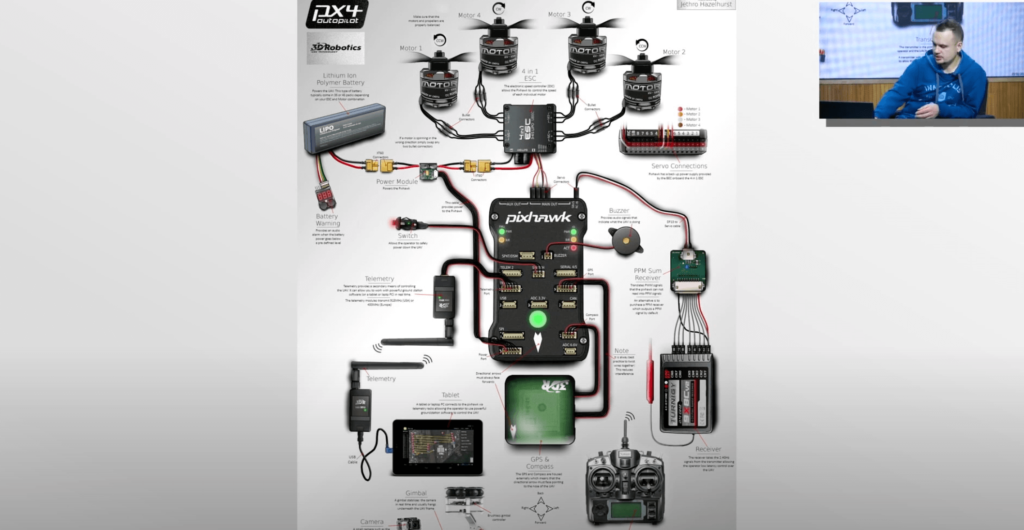
Ово је дијаграм једног од најпопуларнијих аутопилота,на основу којих се могу правити нови уређаји. Повезује се са свим моторима и сензорима. Штавише, мотори имају сопствену контролну јединицу, ЕСЦ регулатор - Елецтрониц Спеед Цонтроллер, који контролише брзину мотора.
Од сензора постоји ГПС да дрон можерадите на отвореном, летите до тачака и стабилизујте положај. Али унутар самог аутопилота постоји и ИМУ - инерцијски сензорски модул који му омогућава да одреди углове положаја. Ту је и комуникациони канал, земаљска контролна станица и батерија.
 УАВ уређај
УАВ уређај
Као што је горе поменуто, постоји нивоконтрола мотора - ми, без оклевања, можемо подесити брзину ротације. Остали нивои раде на истом принципу: следећи је контрола оријентације.
Али прво морамо да контролишемо брзину ротације- ФПВ хеликоптери лете на овом нивоу (уређаји који вам омогућавају да гледате слику са камере дрона у реалном времену из првог лица (ФПВ - Фирст Персон Виев). Искусни пилоти подешавају брзину ротације и стално управљају џојстиком. Следећи фаза је када корисник може да стабилизује угао, али ће се дрон и даље кретати. Следеће је контрола брзине, а највиша је контрола положаја, маневри за кретање до тачке или кретање дуж дате путање.
Они који желе да програмирају, граде иконтролне дронове - треба обратити пажњу на аутопилот отвореног кода ПИКС4. Постоји читава заједница око ваздушне роботике (РОС - роботски оперативни систем, или Опен роботицс), постоје симулатори за дронове. Због тога се многи експерименти могу урадити у симулатору без самог дрона.
Фазе развоја дронова
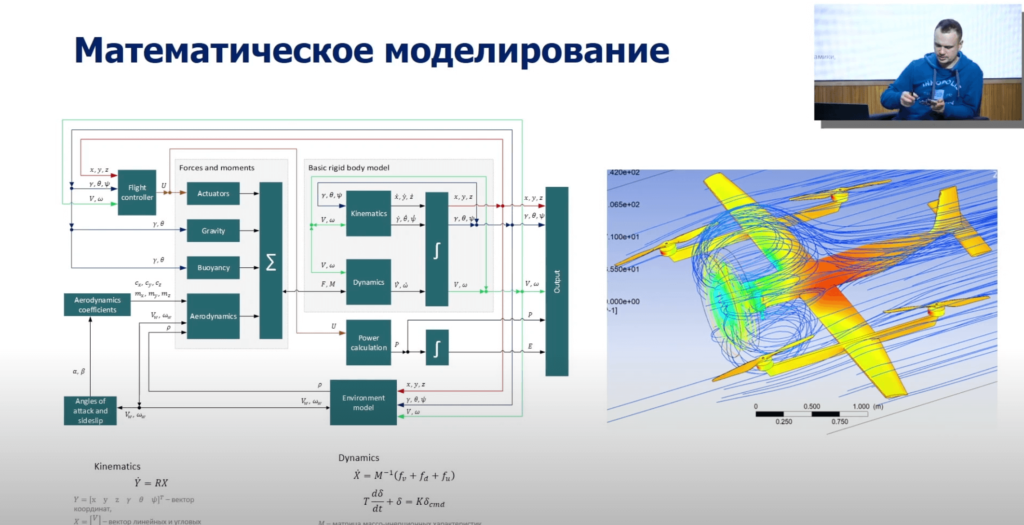
Истраживачи почињу са концептуалниммоделирање, а затим треба да изграде тачан модел апарата. Без уласка у формулу, модел хеликоптера је у суштини модел крутог тела. Ово је други Њутнов закон проширен на системе честица. Има транслационо и ротационо кретање, постоји кинематика и динамика кретања, а да бисмо описали модел конкретног уређаја, овде морамо додати једначину сила које делују на конкретан дрон.
 Како се моделирају беспилотне летелице
Како се моделирају беспилотне летелице
Следећи корак је развој системаменаџмент. Ако идемо на класичан начин: прво сазнамо тачан математички модел и на основу њега већ синтетишемо управљачки алгоритам или нове формуле. У систем управљања могу бити укључени сви нивои: планирање кретања, перцепција околине, процена стања уз помоћ сензора. Алгоритми нам омогућавају да прецизирамо наше координате и податке.
 Систем управљања дроном
Систем управљања дроном
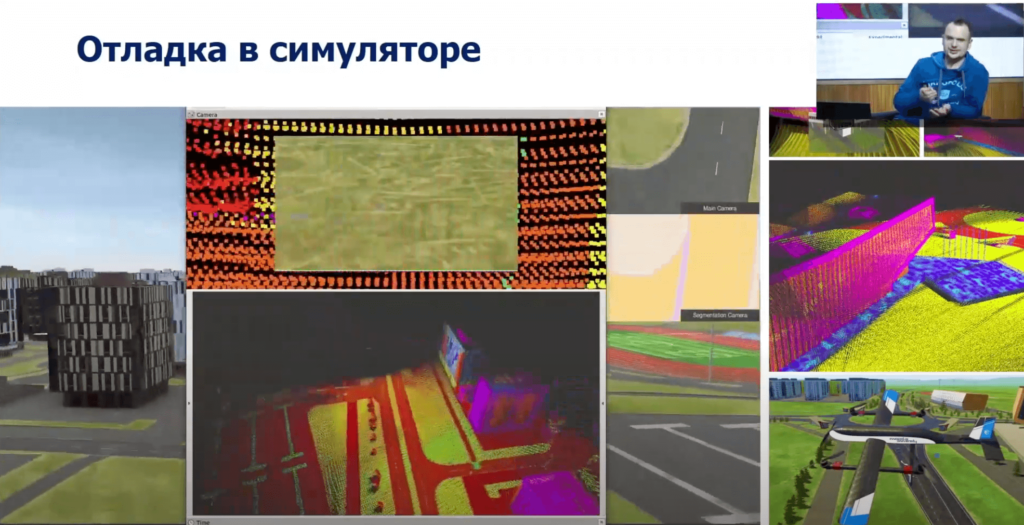
Када постоји контролни алгоритам, то може бити одмахприменити, али то је прилично скупо. Уређаји се руше при најмањој грешци - то се мора узети у обзир и направити резервне копије. За тестирање се користе симулатори.
Испод је виртуелни обилазак Иннополисаје производ нашег универзитета, доступан је за преузимање на ГитХуб-у. Ово није само визуелна компонента, већ и подаци свих сензора уређаја. Има све сензоре положаја, контролише се као дрон и може да отклони грешке у свим алгоритмима управљања.
 Како дронови уче у симулацији
Како дронови уче у симулацији
Када се на основу искуства са симулатором појавивише самопоуздања - можете прећи на имплементацију хардвера. Овде су приказане његове компоненте: израда уређаја од угљеника и композита, израда електронике, постављање мотора, њихово причвршћивање.
Тестови не почињу на улици:Прво, уређаји се тестирају на суспензији или посебном постољу. Могу се користити за отклањање грешака у елементима функционисања беспилотне летелице. На пример, овде је приказан авион за вертикално полетање и слетање – ово је хибрид хеликоптера и авиона на снимку можете видети како се носи са спољним сметњама и одржава угао; На десној страни је прилично луд експеримент где упалите пет мотора одједном и видите како се контролни систем носи са тим.
 Како се праве дронови
Како се праве дронови
Након тестирања, прелазе на летове -мала полетања при малим брзинама, контролисано кретање са пилотом који може да преузме контролу. Завршни акорд је потпуно беспилотни лет.
Уређај полеће вертикално -„као у хеликоптеру“, онда се његов главни мотор укључује, дрон убрзава, прелази у режим рада авиона и развија довољну брзину да крило ради. Затим се контурни пропелери искључују, и лети као авион – процес слетања се одвија обрнутим редоследом.&нбсп;
Шта се дешава са дроновима
Један од задатака који савременинаучници — заобилазећи препреке у лету. Неки дронови већ знају како то да ураде, али задатак је мало шири – потребно је да научите уређаје да се крећу што је брже могуће у окружењу са препрекама. И још има простора за настојање и побољшање алгоритама.
Још један пример таквог тестирања је лет дошума. Постоји веома занимљив приступ - овде се не користе само нови алгоритми, већ и сензори - камера за догађаје. Ово је камера веома високе фреквенције која преноси разлику између кадрова у свакој јединици времена: ово вам омогућава да брзо контролишете и реагујете на препреке.
У области планирања кретања дронова,такмичење: ко ће брже. Задатак је мапирати непознато подручје, изградити његову тродимензионалну представу, пронаћи објекте на њему. Летели смо на универзитету, али и решили проблем проналажења предмета. Наши резултати су били чак и бољи од познатих објављених алгоритама.
Постоје такмичења у трци дронова.Раде се на уређајима са камером, када пилот има заштитне наочаре и управља дроном како би што брже пролетео кроз капију. Прилично спектакуларан догађај, где се исти задатак мора извршити у аутоматском режиму. Нажалост, компјутер је до сада успео да победи човека само у шаху, а робот дрон није успео да претекне пилота човека, иако је напредак већ прилично озбиљан. Дрон уз помоћ алгоритма машинског вида може да обавља такве задатке, посао је само да повећа брзину.
Друго такмичење је Мицрософт Гамес офдронова, спроводи се у симулатору. У истој области одржава се једно од познатих водећих такмичења у Саудијској Арабији. Тамошњи учесници се регрутују три године унапред.
Беспилотни уређаји се користе за емисије дронова- Ово су спектакуларни догађаји који су данас постали замена за ватромет. Али то није једина групна употреба –&нбсп;могу да прегледају већу површину.&нбсп;
Где се примењује
Тако да не личи искључиво на научноразвој, испод је демо Скидио дрона. Сада је ово најнапреднији уређај у смислу аутономије. Ово је пример како се савремене технологије – картографија, избегавање препрека, планирање саобраћаја користе заједно у производу који је већ доступан кориснику.
Други правац су нови дизајниавиона. Један од њих су склопиви дронови. Један такав уређај може да одлети у уске просторе ради прегледа након несреће. Други пример је дрон који може да се отвори. На пример, може да излети из уске пнеуматске цеви, а затим да лети као и обично.
Имамо и пројекат у овој области - ово јемеки Тенсодроне. Ово је први мекани дрон који лети. Задовољство је што га можете испустити и остаће нетакнут. Поред тога, можете променити дужину греда, напетост каблова.
Два примера која ће заживети уускоро. Прво, испорука помоћу дронова. Сада постоји веома интересантна имплементација где комбинујемо пакетни терминал и станицу за слетање дронова - у овом случају не треба да бринемо када ће дрон стићи, где ће слетети, како бисмо могли да стигнемо до њега на време и покупите терет пре него што буде украден. Други пример је летећи такси. Ово је најузбудљивија област развоја и већ постоје прототипови који раде. Али то ће се догодити тек у наредној деценији.
Каква су се дешавања у области летећих таксија појавила у последњих 6 година:
– Компанија „Ховер” представила је уређај саелектромотор ниске буке и компактне димензије - попут аутомобила. Полеће на висину од 150 м и слеће на стандардно паркинг место. Дрон је предвиђен за два путника, максимална носивост је 300 кг, а брзина 200 км/х.
— 2016. године руска компанија Ховерсурфпоказао ховербике који можете носити са собом и полетети у било ком тренутку са редовног градског паркинг места. Достиже брзине до 100 км/х, а висина дизања је из безбедносних разлога принудно ограничена на 5 метара.
— У 2018. развио Аирбус путникАвион Алпха Оне ВТОЛ попео се на висину од 5 метара и остао у ваздуху 53 секунде. Корисник ће преко апликације моћи да позове УАВ и да стигне са једне тачке на другу како унутар града тако и шире.
— 2020. направио је авио-такси Цити Аирбуспрви слободан лет. Тестирање је обављено у предграђу Париза, граду Ил де Франс.Авиона ЦитиАирбус је способна да се креће брзином до 120 км/х на удаљености до 30 км. Тежина летећег таксија је више од 2,2 тоне, ЦитиАирбус је опремљен са три путничка седишта и једним седиштем за возача.
- Кинески стартап Пантуо Авиатион је 2022. године представио Т1, летећи такси демонстратор са ваздушним каналом. Летеће брзином од преко 300 км/х и имаће домет од 250 км.
Опширније:
Свемирска сонда је летела 200 км од Меркура. Погледај шта је видео
Научници откривају како витамини утичу на појаву рака
Кинески шлем за читање мисли звучи аларм када особа види порно садржај