หุ่นยนต์ไม่เพียงแต่สามารถเคลื่อนที่ได้เท่านั้น แต่ยังควบคุมวัตถุได้อีกด้วย ตามที่ผู้เขียนในวันนี้ความต้องการ
ดังนั้น ผู้เขียนรายงานฉบับใหม่จึงได้นำเสนอการออกแบบโดยใช้กลไกแขนขาซึ่งติดตั้งเอนด์เอฟเฟกต์ต่างๆ เพื่อปรับปรุงประสิทธิภาพ
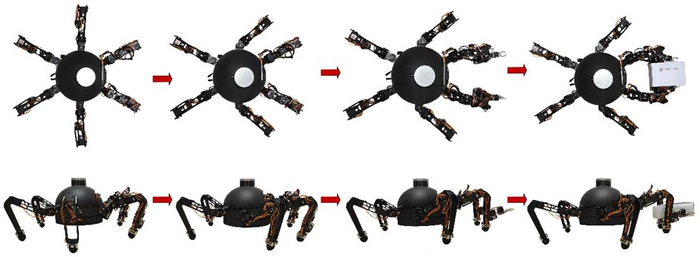
ทีมงานตั้งข้อสังเกตว่าการยักย้ายระหว่างการเคลื่อนไหวเป็นวิธีที่ดีในการเพิ่มประสิทธิภาพและเพิ่มเวลา หุ่นยนต์ตัวใหม่นี้มีชื่อว่า ALLOMAN hexapod ด้วยการบูรณาการของขาและแขน หุ่นยนต์จึงสามารถจัดการวัตถุที่เคลื่อนที่ได้
จนถึงตอนนี้ ALLOMAN hexapod เป็นรุ่นทดลองต้นแบบ ในขั้นต่อไปของงาน ผู้เขียนจะแนะนำฟังก์ชันเพิ่มเติมสำหรับการปรับแต่ง ผู้เขียนวางแผนที่จะใช้การพัฒนาในพื้นที่ที่ต้องการแพลตฟอร์มมัลติฟังก์ชั่น เช่น เพื่อความปลอดภัยของเมือง การต่อสู้กับการก่อการร้าย และการสำรวจดาวเคราะห์
อ่านเพิ่มเติม:
มันถูกตามล่ามาหลายศตวรรษ: เรารู้อะไรเกี่ยวกับดาววัลแคนข้างดวงอาทิตย์?
นักดาราศาสตร์พบดาวเคราะห์ใกล้โลก มีวงโคจรที่แปลกประหลาดมาก
ความเป็นคู่ที่อธิบายไม่ได้ที่พบในฟิสิกส์อนุภาคมูลฐาน: สิ่งที่จะนำไปสู่