นักวิจัยจากสถาบันเทคโนโลยีอิตาลีได้นําเสนอต้นแบบของหุ่นยนต์สามขาที่
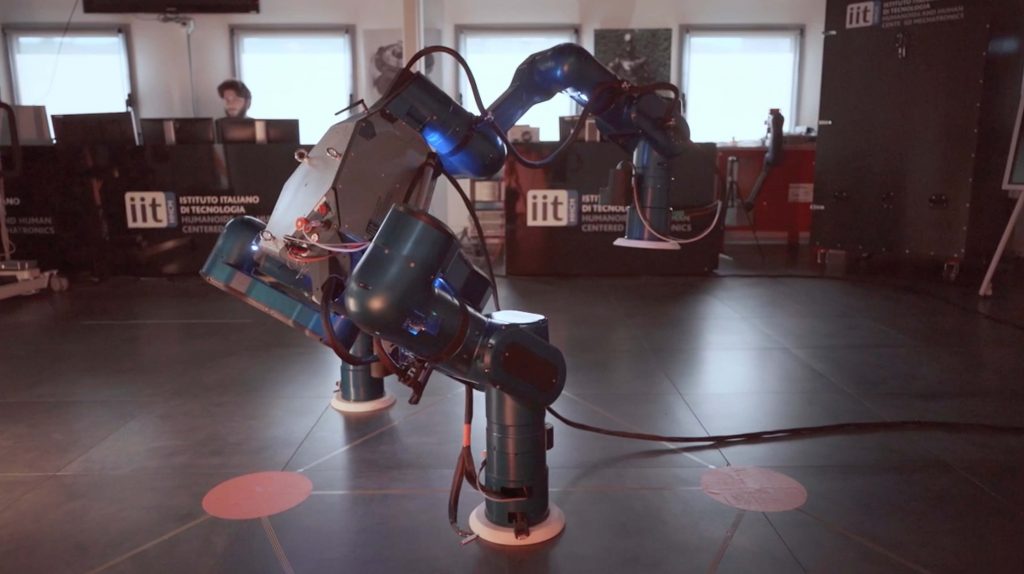
แพลตฟอร์มหุ่นยนต์ MARM ประกอบด้วยลำตัวส่วนกลาง แขนสามส่วน และอุปกรณ์เชื่อมต่อแบบพิเศษ หลังใช้เพื่อชาร์จอุปกรณ์และแลกเปลี่ยนข้อมูล เมื่อสร้างหุ่นยนต์ นักวิทยาศาสตร์ได้จัดเตรียมความเป็นไปได้ในการทำงานทั้งในสภาวะที่มีแรงโน้มถ่วงและสภาวะไร้น้ำหนัก
หุ่นยนต์มาร์ม วีดีโอ: ไอไอที
หุ่นยนต์ MARM สามารถใช้สามขาในการการเคลื่อนไหวโดยการคว้าจุดเชื่อมต่อมาตรฐานบนพื้นผิวของสถานีและคลานไปเหนือสิ่งเหล่านั้น นอกจากนี้ยังสามารถประกอบและจัดตำแหน่งส่วนประกอบต่างๆ ของอุปกรณ์ เช่น การเคลื่อนย้ายและติดตั้งแผ่นโมดูลาร์หกเหลี่ยมแบบโมดูลาร์กว้าง 1.2 ม. ที่ใช้ในสถานีอวกาศนานาชาติ และการจัดการปลั๊กอินวงโคจร

หุ่นยนต์มาร์ม ภาพข่าว: ไอไอที
การกำหนดค่าสามขา - พื้นฐานความแตกต่างระหว่างหุ่นยนต์รุ่นใหม่กับการพัฒนาก่อนหน้านี้ ตามที่วิศวกรให้ความยืดหยุ่นมากขึ้นในการทำงานของอุปกรณ์ ตัวอย่างเช่นเขาสามารถใช้ "มือ" สองข้างในการทำงานโดยจับพื้นผิวด้วยความช่วยเหลือจากมือที่เหลือ
นักวิจัยแนะนำให้ใช้ MARM เพื่อรับสินค้าจากคลังสินค้า เคลื่อนย้ายไปยังสถานที่ที่เหมาะสม รวบรวมและจัดวาง ต้นแบบจะได้รับการทดสอบในสภาวะไร้น้ำหนักโดยคำนึงถึงสถานการณ์นี้ หลังจากนั้นจะมีการสร้างเวอร์ชันที่ใช้งานได้จริงเพื่อส่งไปยังสถานีอวกาศนานาชาติ
อ่านเพิ่มเติม:
นักวิทยาศาสตร์จากเขตเพอร์มาฟรอสต์: พวกเขาพัฒนาเสื้อผ้าอัจฉริยะและวัคซีนป้องกันมะเร็งได้อย่างไร
พบดาวเคราะห์ 2 ดวงอยู่ไม่ไกลจากโลก บางทีพวกมันอาจอาศัยอยู่
นักวิทยาศาสตร์ค้นพบว่าใครได้ประโยชน์จากการตายของไดโนเสาร์