นักพัฒนาได้สร้างระบบอัตโนมัติเต็มรูปแบบที่เรียนรู้ในกระบวนการปกติ
“ในระบบนี้ ผู้ใช้และระบบจะเรียนรู้จากกันและกันไปพร้อม ๆ กัน มีศักยภาพในการปรับปรุงความสะดวกสบายและความน่าเชื่อถือของหุ่นยนต์เทียม” Yeng กล่าว
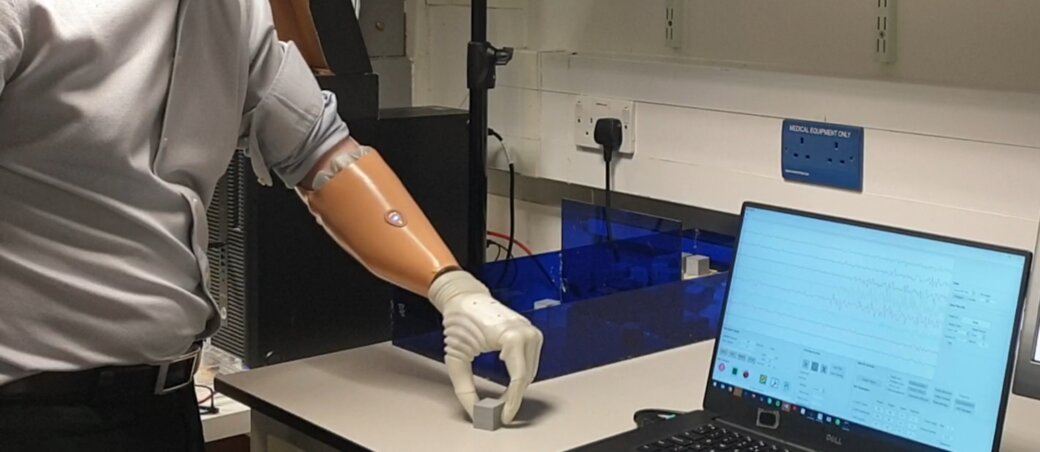
ผลการวิจัยที่ตีพิมพ์ในวารสารธุรกรรมของ IEEE เกี่ยวกับวิศวกรรมชีวการแพทย์ได้รับการตรวจสอบในสภาพแวดล้อมเสมือนจริง เปรียบเทียบกับระบบที่มีอยู่ในปัจจุบัน หลังจากการทดสอบที่ประสบความสำเร็จ ทีมวิจัยได้ทดสอบอินเทอร์เฟซผู้ใช้และอวัยวะเทียมอันล้ำสมัยที่ Imperial College London นักพัฒนาขอให้ผู้พิการทางร่างกายขยับที่หนีบผ้า: นักกายภาพบำบัดมักใช้การทดสอบแบบนี้เพื่อประเมินการทำงานของแขนขาส่วนบน
 แขนเทียมที่ทันสมัยควบคุมโดยการกระตุ้นกล้ามเนื้อ มหาวิทยาลัยอัลโต
แขนเทียมที่ทันสมัยควบคุมโดยการกระตุ้นกล้ามเนื้อ มหาวิทยาลัยอัลโต
การทำงานของระบบได้รับการศึกษาผ่านการทดสอบที่มีการควบคุมและได้มาตรฐาน แต่ความต้องการของผู้ใช้จะระบุได้ดีที่สุดผ่านการศึกษาเชิงคุณภาพตามยาว
“สำหรับการพัฒนาในอนาคต ความร่วมมือกับศูนย์การแพทย์และผู้ใช้อวัยวะเทียมเป็นสิ่งสำคัญมาก” Yeng กล่าว
ผู้ที่มีการตัดแขนขาตอนบนสามารถควบคุมหุ่นยนต์เทียมได้โดยการเกร็งกล้ามเนื้อที่เหลือ การเชื่อมต่อที่อวัยวะเทียมรับสัญญาณไฟฟ้าที่ผลิตโดยกล้ามเนื้อเรียกว่าส่วนต่อประสานไมโออิเล็กทริก ขาเทียมที่ทันสมัยที่สุดใช้อัลกอริธึมการเรียนรู้ของเครื่องเพื่อช่วยตีความสัญญาณที่ผู้ใช้สร้างขึ้นเหล่านี้ อย่างไรก็ตาม พันธะเหล่านี้มักอ่อนไหวต่อปัจจัยภายนอก เช่น เหงื่อออก และอ่อนตัวลงเมื่อเวลาผ่านไป เพื่อแก้ปัญหานี้ ชุมชนการวิจัยได้เสนออัลกอริธึมต่างๆ ที่สามารถปรับให้เข้ากับสถานการณ์ที่เปลี่ยนแปลงได้ดีขึ้น
อ่านเพิ่มเติม:
นักวิทยาศาสตร์ได้ค้นพบคนที่มีสุขภาพดีที่สุดในโลก: ทั้งหมดเกี่ยวกับไลฟ์สไตล์ที่ไม่เหมือนใคร
อันตรายจาก VPN ฟรี เหตุใดจึงไม่สามารถดาวน์โหลดได้และจะป้องกันตนเองได้อย่างไร
นักฟิสิกส์ได้สร้างความสามารถของ T-1000 ขึ้นใหม่จาก "Terminator-2" ในห้องปฏิบัติการ