นักวิจัยจากสถาบันเทคโนโลยีแมสซาชูเซตส์ได้พัฒนาแขนหุ่นยนต์ที่มีความสูง
การพัฒนานั้นขึ้นอยู่กับนิ้วของหุ่นยนต์ด้วยโครงกระดูกแข็งล้อมรอบด้วยชั้นนอกที่อ่อนนุ่ม ภายในนิ้ว นักวิจัยได้วางเซ็นเซอร์ GelSight ความละเอียดสูงหลายตัวฝังอยู่ใต้ “ผิวหนัง” ซิลิโคนโปร่งใสเพื่อให้ภาพตัดขวาง พวกเขาใช้กล้องและไฟ LED สามดวงเพื่อรวบรวมข้อมูลภาพเกี่ยวกับรูปร่างของวัตถุ โดยให้การอ่านอย่างต่อเนื่องตลอดความยาวของนิ้ว
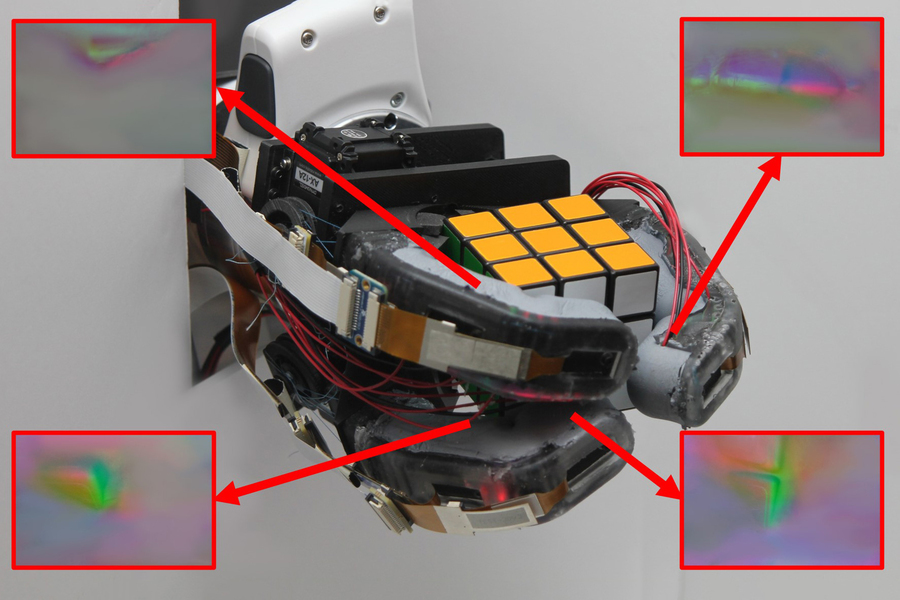 นิ้วแต่ละนิ้วมีกล้องมองภาพซ้อน 2 ตัวและไฟ LED 6 ดวง ภาพ: ข่าว MIT
นิ้วแต่ละนิ้วมีกล้องมองภาพซ้อน 2 ตัวและไฟ LED 6 ดวง ภาพ: ข่าว MIT
เมื่อนิ้วจับวัตถุ กล้องจะจับภาพภาพเป็นไฟ LED สีส่องสว่างผิวจากภายใน อัลกอริทึมทำการคำนวณแบบผกผันเพื่อแมปเส้นขอบบนพื้นผิวของวัตถุที่จับภาพโดยใช้รูปทรงเรืองแสงที่ปรากฏบนผิวที่อ่อนนุ่ม นักวิจัยได้ฝึกโมเดลแมชชีนเลิร์นนิงเพื่อระบุวัตถุโดยใช้ข้อมูลภาพดิบจากกล้อง
หุ่นยนต์ทางเลือกมากที่สุดกริปเปอร์ใช้เซ็นเซอร์อันทรงพลังที่ติดตั้งบนปลายนิ้ว นักวิจัยตั้งข้อสังเกต ดังนั้น วัตถุจะต้องสัมผัสกับพวกมันอย่างเต็มที่จึงจะสามารถระบุได้ การออกแบบอื่นๆ ใช้เซ็นเซอร์ที่มีความละเอียดต่ำกว่ากระจายทั่วทั้งนิ้ว แต่ไม่สามารถเก็บรายละเอียดได้มากเท่า ทั้งสองตัวเลือกต้องการการจับภาพหลายครั้งเพื่อวิเคราะห์รายการ
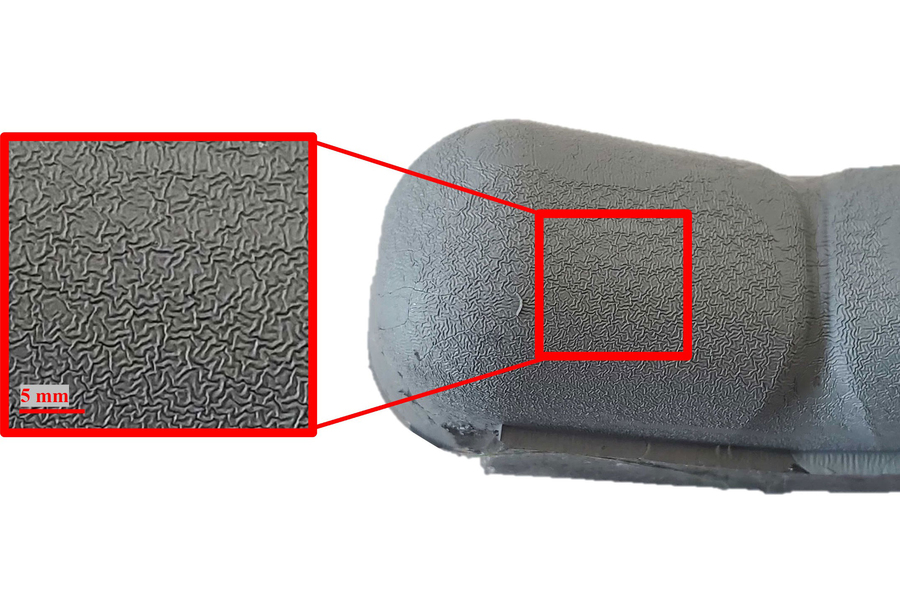 "รอยย่น" เล็กๆ บนพื้นผิวของซิลิโคนช่วยให้นิ้วสามารถเลื่อนไปบนพื้นผิวของวัตถุเพื่อการระบุที่ดีขึ้น ภาพ: ข่าว MIT
"รอยย่น" เล็กๆ บนพื้นผิวของซิลิโคนช่วยให้นิ้วสามารถเลื่อนไปบนพื้นผิวของวัตถุเพื่อการระบุที่ดีขึ้น ภาพ: ข่าว MIT
จากการศึกษาพบว่าอุปกรณ์ใหม่การจับภาพเพียงครั้งเดียวก็เพียงพอที่จะระบุวัตถุต่างๆ ด้วยความแม่นยำสูงถึง 85% ในขณะเดียวกัน โครงกระดูกที่แข็งทำให้นิ้วแข็งแรงพอที่จะยกของหนัก เช่น สว่าน และหนังที่อ่อนนุ่มช่วยให้คุณบีบได้อย่างปลอดภัย แต่ไม่กดทับวัตถุที่ยืดหยุ่นได้ เช่น ขวดน้ำพลาสติกเปล่า
เป้าหมายของเราในการทำงานนี้คือรวมทุกสิ่งที่ทำให้มือมนุษย์ของเราดีมากเป็นนิ้วหุ่นยนต์ที่สามารถทำงานที่นิ้วหุ่นยนต์อื่น ๆ ไม่สามารถจัดการได้ในปัจจุบัน
Sandra Liu ผู้ร่วมเขียนงานวิจัย นักศึกษาระดับบัณฑิตศึกษาของ MIT
อ่านเพิ่มเติม:
ปรากฎว่าการสังเคราะห์ด้วยแสงไม่ได้ผลอย่างที่นักวิทยาศาสตร์คิด ตอนนี้พวกเขาต้องการแฮ็คมัน
กาแล็กซีวิทยุที่อยู่ไกลออกไปกลายเป็นหลุมดำซึ่งมุ่งตรงมายังโลก
พบวิธีลดน้ำหนักและน้ำตาลในเลือด นักวิทยาศาสตร์สัญญาว่าการผ่าตัดจะได้ผล
ภาพหน้าปก: ข่าว MIT