วิศวกรจากห้องปฏิบัติการหุ่นยนต์และการออกแบบเทคโนโลยีชีวภาพของมหาวิทยาลัยเทคโนโลยีสิงคโปร์
มือจับหุ่นยนต์พร้อมพื้นที่ทำงานที่สามารถตั้งโปรแกรมใหม่ได้ วีดีโอ: สทส
ด้ามจับแบบนุ่มมีความยืดหยุ่นและนักวิทยาศาสตร์ตั้งข้อสังเกตว่าวัสดุที่ยืดหยุ่นสูงช่วยให้สามารถจับรูปทรงเรขาคณิตที่หลากหลายได้อย่างปลอดภัยและปลอดภัยและจัดการกับวัตถุที่เปราะบาง แต่ในขณะเดียวกัน ซอฟต์ไดร์ฟแบบดั้งเดิมก็มีข้อจำกัดในการใช้งานและได้รับการออกแบบมาให้ทำงานเฉพาะทางสูง
วิศวกรได้พัฒนาระบบขับเคลื่อนแบบนุ่มนวลนั้นก้าวข้ามข้อจำกัดเหล่านี้ได้เป็นครั้งแรก อุปกรณ์ใหม่นี้ใช้การกระตุ้นแบบหลายรูปแบบ ซึ่งสามารถปรับเปลี่ยนพื้นที่ทำงานแบบ soft-grip ได้อย่างรวดเร็วเพื่อรองรับน้ำหนักบรรทุกที่มีข้อกำหนดด้านพื้นที่สัมผัสที่แตกต่างกัน เพื่อให้บรรลุเป้าหมายนี้ วิศวกรจึงใช้รูปทรงนิ้วที่ปรับเปลี่ยนได้ ด้ามจับแบบยืดหดได้ และฝ่ามือที่ขยายได้
หุ่นยนต์จับยึดพร้อมพื้นที่ทำงานที่ตั้งโปรแกรมใหม่ได้ วิดีโอ: Snehal Jain และคณะ Soft Robotics
หุ่นยนต์จับยึดพร้อมพื้นที่ทำงานที่ตั้งโปรแกรมใหม่ได้ วิดีโอ: Snehal Jain และคณะ Soft Robotics
ในชุดของการทดลองนักวิจัยได้แสดงให้เห็นว่ากริปเปอร์ปรับพื้นที่การทำงานสามารถจับเมล็ดข้าวหรือเส้นก๋วยเตี๋ยวแต่ละเมล็ดที่มีรัศมีไม่เกิน 1.5 มม. หรือหยิบจับวัตถุบางที่มีความหนาไม่เกิน 300 ไมครอน เช่น นามบัตรหรือแผ่นกระดาษ ในขณะเดียวกันก็สามารถหยิบจับสิ่งของขนาดใหญ่และหนักได้ เช่น การยกผลเมล่อน การเคลื่อนย้ายกล่องซีเรียล หรือถุงที่มีน้ำหนักไม่เกิน 1.5 กก.
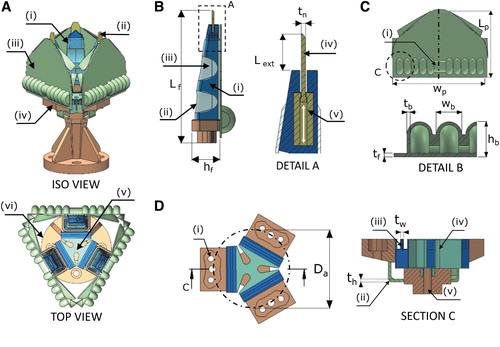 อุปกรณ์จับภาพช่วยให้เขาเปลี่ยนการกำหนดค่าของพื้นที่ทำงานได้อย่างรวดเร็ว ภาพ: Snehal Jain et al., Soft Robotics
อุปกรณ์จับภาพช่วยให้เขาเปลี่ยนการกำหนดค่าของพื้นที่ทำงานได้อย่างรวดเร็ว ภาพ: Snehal Jain et al., Soft Robotics
ความสามารถของอุปกรณ์ในการเปลี่ยนแปลงอย่างรวดเร็วช่วยให้สามารถทำงานจำนวนมากที่ต้องใช้อุปกรณ์ต่าง ๆ มากมาย นักพัฒนาทราบว่าอุปกรณ์นี้มีประโยชน์ในอุตสาหกรรมอาหารซึ่งจำเป็นต้องทำงานกับผลิตภัณฑ์อาหารขนาดเล็กและภาชนะขนาดใหญ่พร้อมกัน
อ่านเพิ่มเติม:
เปลวไฟระดับ X ที่แข็งแกร่งที่สุดเกิดขึ้นบนดวงอาทิตย์
"ฟองน้ำต้านมะเร็ง" หยุดการแพร่กระจายของเนื้อร้ายได้ 100%
ความลับของความทนทานของคอนกรีตโรมันถูกเปิดเผย: สามารถซ่อมแซมได้