ชื่อ Dyret (ภาษานอร์เวย์สำหรับ "สัตว์") เป็นตัวย่อของ Dynamic Robot for Embodied Testing
“ เราได้แสดงให้เห็นถึงประโยชน์ของการเป็นหุ่นยนต์สามารถปรับรูปร่างได้ตลอดเวลา หุ่นยนต์ของเราพิสูจน์ให้เห็นว่าสิ่งนี้สามารถทำได้อย่างง่ายดายด้วยเทคโนโลยีสมัยใหม่” Tonnes Nygaard อาจารย์อาวุโสในภาควิชาวิทยาการคอมพิวเตอร์ของ UiO อธิบาย
ในกรณีของ Dairet การปรับรูปร่างใหม่หมายความว่าเขาควบคุมความยาวของขา กลไกการปรับรูปร่างของร่างกายได้พิสูจน์แล้วว่ามีประโยชน์มากสำหรับหุ่นยนต์
ก่อนหน้านี้นักวิทยาศาสตร์แสดงให้เห็นว่าหุ่นยนต์ของพวกเขากำลังปรับตัวไปยังสภาพแวดล้อมต่างๆภายใต้สภาวะในร่มที่มีการควบคุม จากนั้น Nygaard ใช้เวลาหกเดือนกับเพื่อนวิศวกรที่ Commonwealth Scientific and Industrial Research Organization (CSIRO) ในออสเตรเลีย เธอเชี่ยวชาญในการทดสอบหุ่นยนต์เรียนรู้ด้วยตนเองกลางแจ้ง
“เคยคิดว่ามันยากเกินไปเข้าถึงโลกแห่งความเป็นจริง ด้วยความช่วยเหลือของหุ่นยนต์และการทดลองของเรา เราแสดงให้เห็นว่าสิ่งนี้เป็นไปได้” Nygaard อธิบายในการให้สัมภาษณ์กับ Titan.uio.no ผลลัพธ์ของงานนี้ได้รับการตีพิมพ์ในวารสารNature Machine Intelligence
หุ่นยนต์สามารถเปลี่ยนความยาวของขาได้เปลี่ยนรูปร่างของร่างกายโดยอัตโนมัติ หุ่นยนต์ปรับตัวตามสัณฐานวิทยาสามารถทำงานในสภาพแวดล้อมที่คาดเดาไม่ได้และเผชิญกับความท้าทายใหม่ ๆ โดยไม่ต้องออกแบบโครงสร้างใหม่หรือสร้างใหม่ทุกครั้งที่พบสิ่งที่ไม่คาดคิด
เป็นเรื่องยากที่มนุษย์จะจินตนาการได้ว่าหุ่นยนต์เคลื่อนที่ได้ยากเพียงใดเช่นจากคอนกรีตไปจนถึงหญ้า อย่าลืมว่าบุคคลมีประสบการณ์หลายปีและมีความรู้สึกค่อนข้างมากเมื่อเทียบกับหุ่นยนต์
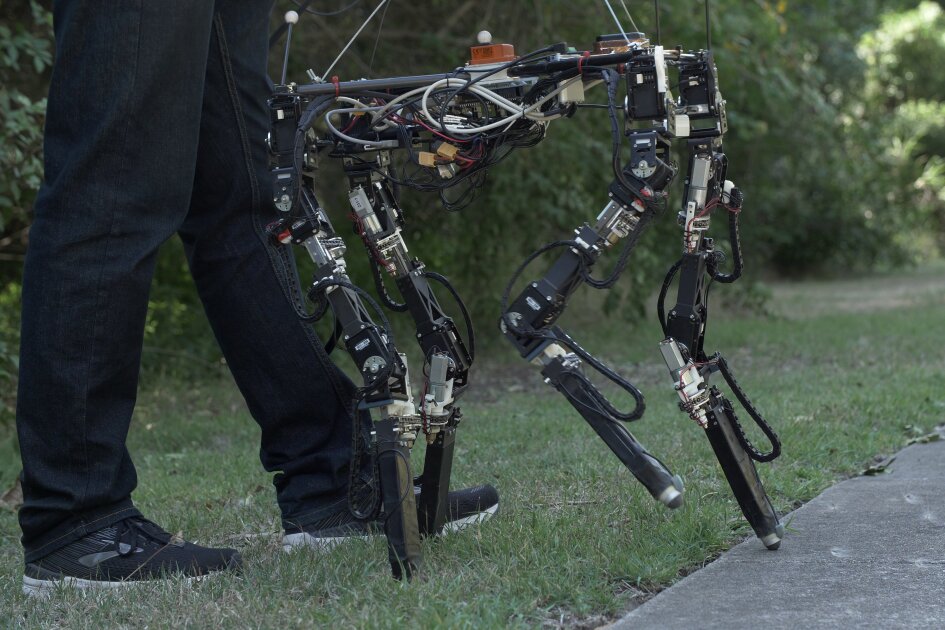 จากหญ้าสู่คอนกรีต: ก้าวกระโดดครั้งใหญ่สำหรับหุ่นยนต์เรียนรู้ด้วยตนเอง เครดิต: Tønnes Nygaard / UiO
จากหญ้าสู่คอนกรีต: ก้าวกระโดดครั้งใหญ่สำหรับหุ่นยนต์เรียนรู้ด้วยตนเอง เครดิต: Tønnes Nygaard / UiO
“ หุ่นยนต์ใช้กล้องเพื่อดูNygaard อธิบายว่าภูมิประเทศไม่เท่ากันและเซ็นเซอร์ที่ขาเพื่อตรวจสอบว่าพื้นผิวต้องเดินหนักเพียงใด Nygaard อธิบาย “ ดิเร็ตเรียนรู้อยู่ตลอดเวลาเกี่ยวกับสภาพแวดล้อมที่เขาเดินผ่านและเมื่อรวมกับความรู้ที่ได้รับจากภายในอาคารในสภาพแวดล้อมที่มีการควบคุมจะใช้สิ่งนี้เพื่อปรับตัวของเขา”
เมื่อดิเรกถูกขอให้เดินบนพื้นหญ้าเขาไม่เคยเห็นหญ้ามาก่อน เขาฝึกเฉพาะกรวดทรายและคอนกรีตเท่านั้น อย่างไรก็ตามเขาเรียนรู้ที่จะเดินบนพื้นหญ้าของออสเตรเลียได้อย่างรวดเร็วและความยาวของขาในอุดมคติคืออะไร พบว่าขาที่สั้นกว่าให้ความเสถียรที่ดีกว่าสำหรับหุ่นยนต์ในขณะที่ขาที่ยาวกว่าจะให้ความเร็วในการเดินที่สูงขึ้นหากสามารถคาดเดาพื้นดินได้เพียงพอ
สนามหญ้าแบนอาจไม่ใหญ่ที่สุดปัญหา แต่หญ้าในธรรมชาติเต็มไปด้วยกระจุกและรูที่สามารถดักจับหุ่นยนต์ขายาวได้ดังนั้น Dairet จึงย่อขาลง บนพื้นคอนกรีตเขาสามารถดึงมันออกมาและ "วิ่งหนี" ได้
หุ่นยนต์ยังปรับให้เข้ากับความเสียหายเมื่อชนสิ่งกีดขวางที่ไม่คาดคิด
“หุ่นยนต์สามารถทำได้ด้วยเทคโนโลยีของเราปรับให้เข้ากับขาข้างหนึ่งของเขาที่เริ่มอ่อนแรงหรือหัก มันสามารถเรียนรู้ที่จะฟื้นตัวได้โดยการเดินกะเผลกหรือลดความยาวของขาอีกสามข้างของมัน” Nygaard กล่าว ด้วยการเรียนรู้จากความผิดพลาดและความล้มเหลว Dayret จึงปรับตัวเข้ากับสภาพแวดล้อมของเขาได้ดีขึ้น
จนกว่า Dairet จะพร้อมที่จะจริงจังงาน เป้าหมายของปริญญาเอกของ Nygaard คือการพัฒนาเทคโนโลยีและค้นหาวัสดุที่เหมาะสมและพิสูจน์ว่าเป็นไปได้ อย่างไรก็ตามเขาเห็นการใช้งานในอนาคตหลายอย่างที่เป็นไปได้ ตัวอย่างเช่นหุ่นยนต์มีประโยชน์ในปฏิบัติการค้นหาและกู้ภัยเช่นเดียวกับในการเกษตรที่มีพื้นผิวและสภาพอากาศที่ยากลำบาก นอกจากนี้ Dairet จะช่วยในการสำรวจเหมืองที่ผู้คนยากที่จะไปถึง
อ่านเพิ่มเติม
นักฟิสิกส์ได้สร้างอะนาล็อกของหลุมดำและยืนยันทฤษฎีของ Hawking นำไปสู่ที่ไหน?
ดาวมฤตยูได้รับสถานะของดาวเคราะห์ที่แปลกประหลาดที่สุดในระบบสุริยะ ทำไม?
เครื่องมือทางวิทยาศาสตร์ SuperCam จาก Perseverance rover ส่งผลลัพธ์แรกมายังโลก