Yeni çalışmanın yazarları, modellerin en iyi şekilde tahmin kullanılarak eğitilebileceğini öne sürdüler.
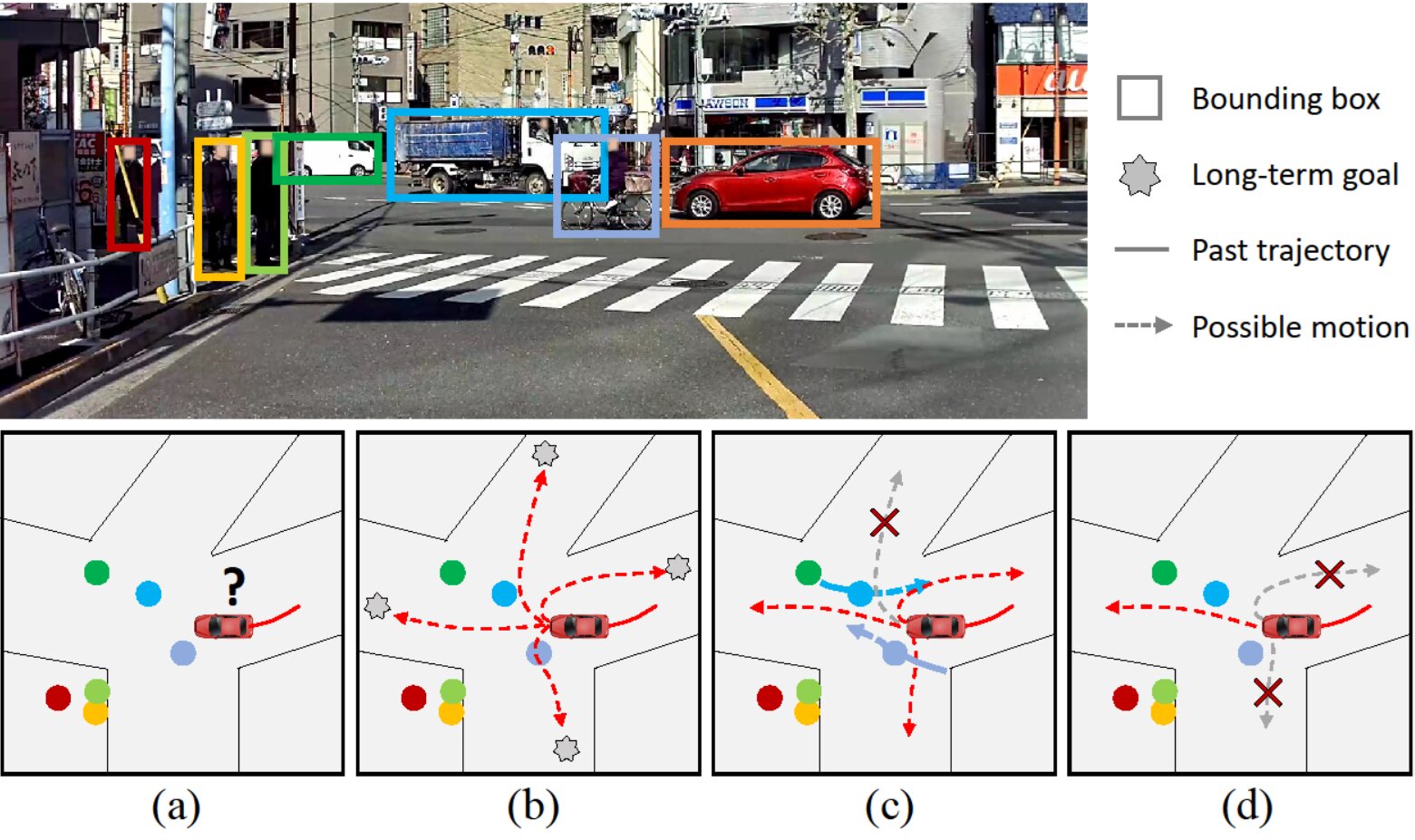
Araştırmacılar hem kısa hem de uzun vadeli hedefleri göz önünde bulunduran bir mimari geliştirmeyi planlıyorlar. Bunlar, bir yayanın veya bir arabanın niyetini değerlendirirken ana bileşenlerdir.
Örneğin, kavşakta duran bir araba var.sola dönmek istiyor. Sadece ulaşımın dinamiklerini değil, aynı zamanda çeşitli faktörlere bağlı olarak niyetin nasıl değişebileceğini de hesaba katmak önemlidir: kişinin kendi isteği, diğer yol kullanıcıları veya engeller nedeniyle.
Daha sonra, algoritma ilk olarak modelin uzun vadeli ve kısa vadeli sonuçların ne olabileceğini tahmin etmek için eğitildiği geçmiş deneyimleri kodlar.
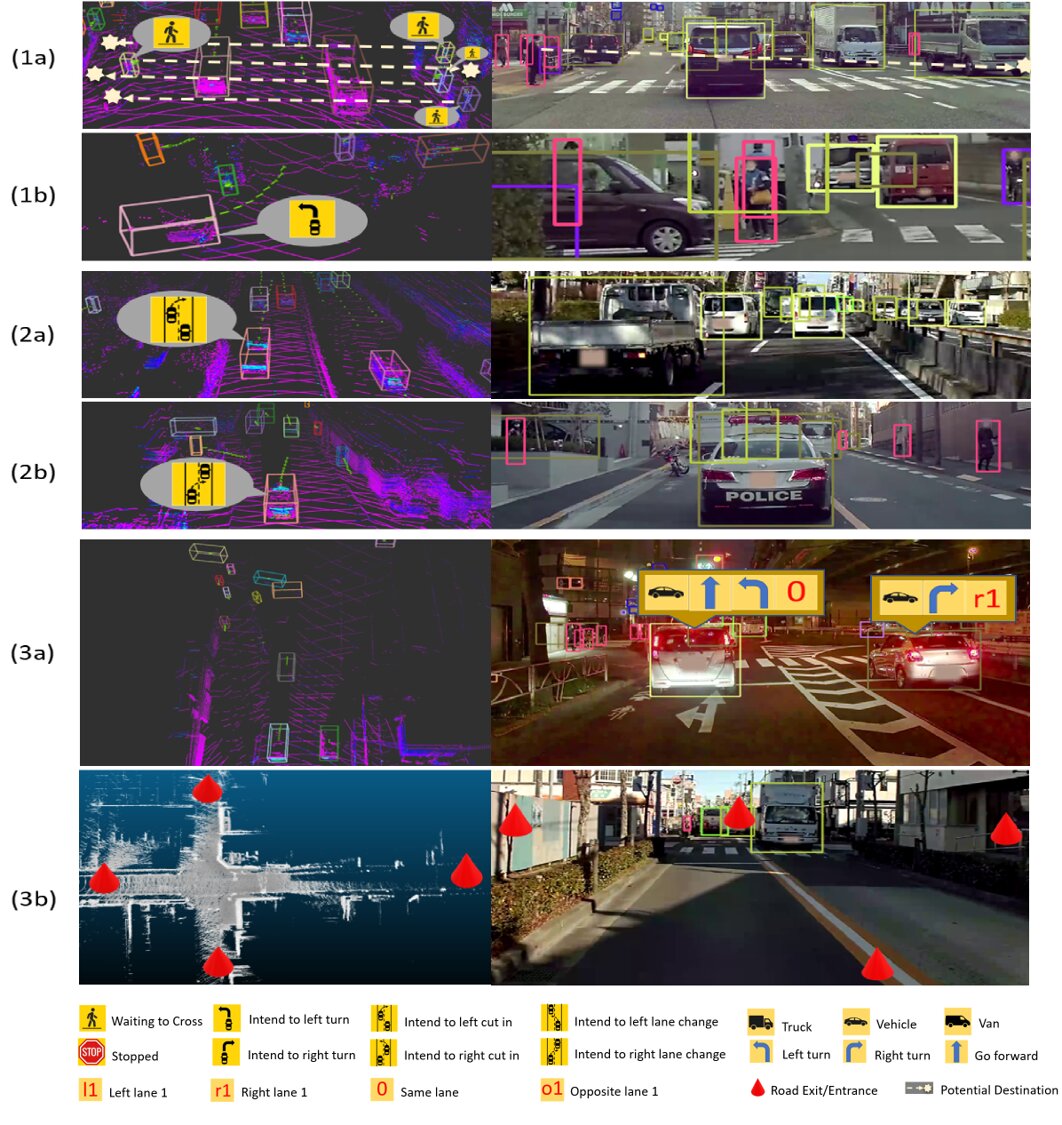
Model çevredeki tüm nesnelere atama yaparipuçları, yol boyunca değişebilen “niyetler”, yol işaretleri ve aktörlerin niyetlerini etkileyen ağaçlar gibi “çevre” ve hava ve yol koşulları gibi “bağlamsal ipuçlarıdır”.
Araştırmacılar, modellerini bir dizi testte değerlendirdiler ve diğer son teknoloji yörünge tahmin yöntemlerinden %27 oranında daha iyi performans gösterdiğini buldular.
Geliştiriciler, modelin olabileceğine inanıyorotonom araçların güvenliğini ve performansını artırmak için kullanılır. Ayrıca, diğer araştırma grupları, yoldaki yayaların ve araçların yollarını tahmin etmek için kendi modellerini hazırlamak için LOKI veri setini kullanabilir.
Okumak Daha öte:
Yeni iOS 15: çıkış tarihi, iPhone tasarımı ve özellikleri. Bilinen her şeyi anlatıyoruz
Beyaz grafenden ultra ince bir malzeme yapıldı. Sunucuların yerini alacak
Bir ton silah taşıyan ağır bir saldırı uçağı görün