Son zamanlarda bilim adamları, insanın belirleme yeteneğini kopyalamayı amaçlayan bir çalışma yürüttüler.
Makale, yalnızca görüntü ve ses işlemeyle değil, dokunarak çevreyle etkileşime girebilen robotlar geliştirmenin faydalarını vurguluyor.
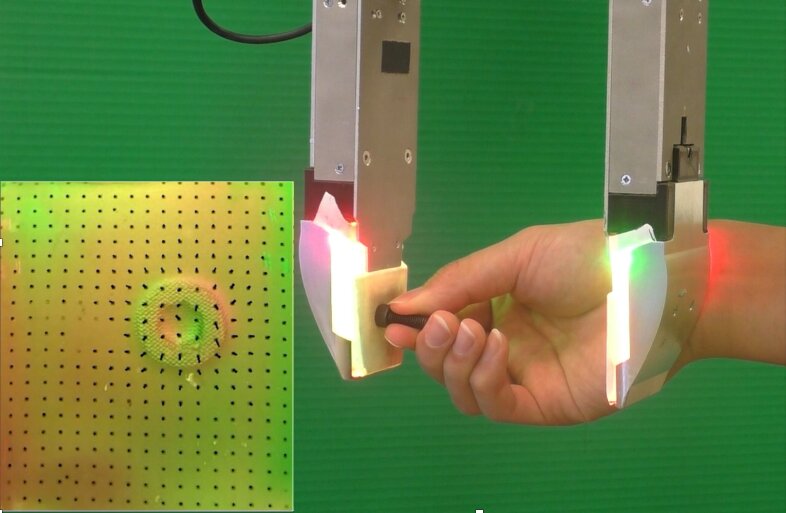
Çalışmamızın amacı bunu göstermekti.Yüksek çözünürlüklü dokunsal algılama sayesinde, bilinen nesnelerin yeri ilk temastan itibaren bile doğru bir şekilde belirlenebilir. Bu, dokunsal yerelleştirmeyle ilgili önceki çalışmalara göre önemli bir ilerlemedir, çünkü başka herhangi bir dış algı moduna (örn. görme) veya manipüle edilen nesnelerle ilişkili önceden toplanmış dokunsal verilere güvenmiyoruz.
Araştırmacılardan biri olan Maria Bauza
Yeni teknik simülasyondan öğrenir vekapsamlı veri toplama gerektirir. Başlangıçta, araştırmacılar, robotun etkileşimde bulunduğu nesne hakkındaki verilere (örneğin, üç boyutlu şekli, özellikleri vb.) Erişebilmesi koşuluyla, belirli bir nesne ile dokunsal sensör arasındaki temasları simüle eden bir yapı geliştirdiler.
Daha sonra araştırmacılar modernRobot tarafından toplanan gerçek dünyadaki dokunsal gözlemleri simülasyon süreci tarafından oluşturulan bir dizi temasla eşleştirmek için bilgisayarlı görme ve temsil öğrenimine yönelik makine öğrenimi yöntemleri.
Esasen bu grup tarafından geliştirilen yöntemaraştırmacılar iletişim bilgilerini bir nesnenin üç boyutlu şekline göre modelleyebilirler. Sonuç olarak, nesnenin dikkatli bir şekilde incelenmesi yoluyla toplanan hiçbir ön dokunsal veriye gerek yoktur. Bu, tekniğin, robotun dokunsal sensörlerine ilk dokunuştan itibaren bir nesne için poz tahminleri oluşturmasına olanak tanır.
Daha fazla oku
Dünya 20 yıl içinde kritik sıcaklığa ulaşacak
Kürtaj ve bilim: doğum yapacak çocuklara ne olacak
İklim değişikliğinden korkmayan bitkiye isim verildi. Bir milyar insanı besliyor