Инженеры из Кембриджского университета разработали мягкую роботизированную руку, напечатанную на
Дослідники використовували надруковану на3D-принтер антропоморфну руку з імплантованими тактильними датчиками, щоб рука могла «відчувати», до чого торкається. Рука була здатна лише до пасивних рухів на основі зап'ястя. «Найбільшою перевагою цієї конструкції є діапазон руху, який ми можемо отримати без використання будь-яких приводів», — кажуть автори роботи.
Обучение «пассивной» роборуки. Видео: University of Cambridge
Вчені провели понад 1 200 тестів з рукою робота,спостерігаючи за її здатністю захоплювати дрібні предмети, не гублячи їх. Спочатку робот навчався з використанням невеликих пластикових кульок, надрукованих на 3D-принтері, і хапав їх, використовуючи наперед певні дії, отримані в результаті демонстрації людьми.
Робот використовував метод спроб і помилок, щобдізнатися, яке захоплення буде успішним. Закінчивши тренування з м'ячами, він спробував схопити різні предмети, включаючи персик, комп'ютерну мишу та рулон пухирчастої плівки. У цих тестах рука змогла успішно схопити 11 із 14 предметів.
Захоплення предметів різного розміру, форми та фактури— завдання, просте для людини, але складне для робота. Більшість сучасних передових роботів не здатні виконувати маніпуляційні завдання, з якими легко справляються маленькі діти. Наприклад, люди інстинктивно знають, яку силу потрібно докласти, щоб підняти яйце, але для робота це проблема: недостатньо міцне захоплення призведе до падіння предмета, надто сильне — розіб'є яйце.
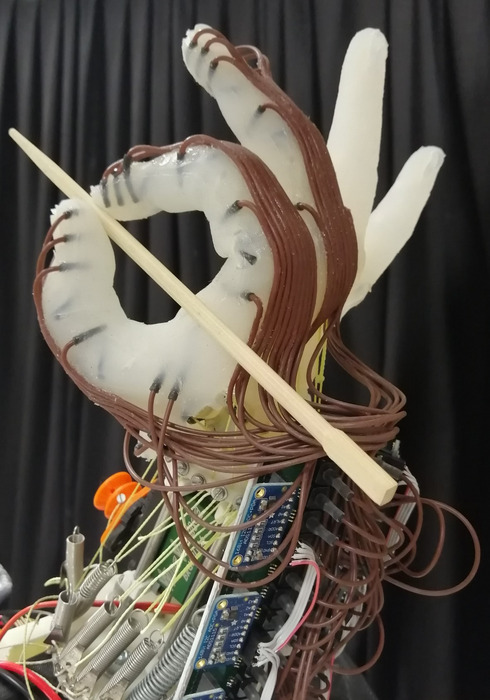 Прототип роботизованого захвату. Зображення: University of Cambridge
Прототип роботизованого захвату. Зображення: University of Cambridge
Складні технології з моторизованими пальцямивимагає значної кількості енергії та великої кількості складних та дорогих приводів для кожного суглоба. Пасивне захоплення, запропоноване інженерами, робить робота набагато простішим в управлінні і набагато енергоефективнішим. Дослідники вважають, що їх конструкція, що адаптується, може бути використана при розробці недорогої робототехніки, здатної до більш природних рухів.
Читати далі:
Подивіться на карту Марса з найвищою роздільною здатністю: 110 000 кадрів та 5,7 трлн пікселів
«Море» кварків усередині одного протону: з чого складається елементарна частка
Новий знімок «Хаббла» спантеличив вчених
На обкладинці прототип роботизованого захоплення. Зображення: University of Cambridge