Дослідники з Італійського технологічного інституту представили прототип триногого робота, який
Роботизована платформа MARM складається зцентрального корпусу, трьох кінцівок та спеціального стикувального пристрою. Останнє використовується для заряджання пристрою та обміну даними. Під час створення робота вчені передбачили можливість роботи як у присутності сили тяжкості, і у умовах мікрогравітації.
Робот MARM. Відео: IIT
Робот MARM може використовувати три кінцівки дляпереміщення, захоплюючи стандартні міжз'єднання на поверхнях станції та повзаючи ними. Крім того, він може збирати та розміщувати компоненти різних пристроїв, наприклад, переміщати та встановлювати модульні шестигранні плити шириною 1,2 м, які використовуються на МКС, а також маніпулювати орбітальними змінними блоками.

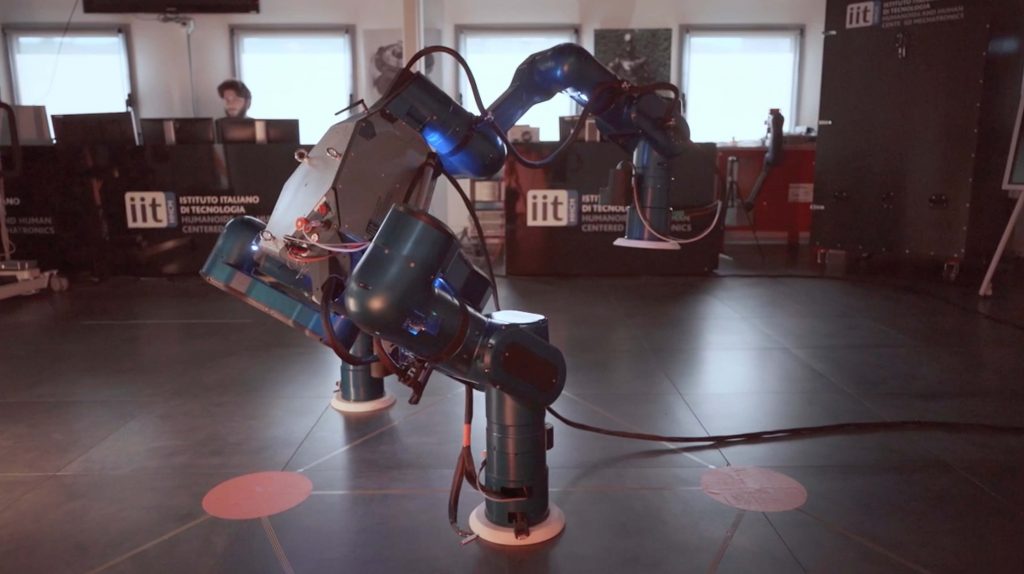
Робот MARM. Фотографії: IIT
Конфігурація з трьох кінцівок - головневідмінність нового робота від попередніх розробок. Це, за словами інженерів, забезпечує більшу гнучкість у роботі пристрою. Наприклад, він може використовувати дві «руки» для роботи, утримуючись на поверхні за допомогою решти.
Дослідники пропонують використовувати MARM, щобзабирати вантажі зі складу, переносити їх у потрібне місце, збирати та розміщувати. Прототип буде протестовано в умовах мікрогравітації з урахуванням цього сценарію, після чого буде створено робочу версію для відправки на МКС.
Читати далі:
Вчені із зони вічної мерзлоти: як вони розробляють розумний одяг та вакцину проти раку
Неподалік Землі знайшли дві планети. Можливо, вони живуть
Вчені з'ясували, кому була вигідна смерть динозаврів