Нещодавно вчені провели дослідження, спрямоване на відтворення людської здатності визначати
У статті наголошується на переваги розробки роботів, які можуть взаємодіяти з навколишнім середовищем за допомогою дотику, а не тільки через зір і обробку звуку.
Метою нашої роботи було продемонструвати, що зЗа допомогою тактильного зондування з високою роздільною здатністю можна точно локалізувати відомі об'єкти навіть з першого контакту. Це важливий крок уперед порівняно з попередніми роботами з тактильної локалізації, оскільки ми не покладаємося на будь-які інші способи зовнішнього сприйняття (наприклад, зір) або раніше зібрані тактильні дані, пов'язані з керованими об'єктами.
Марія Бауза, одна з дослідників
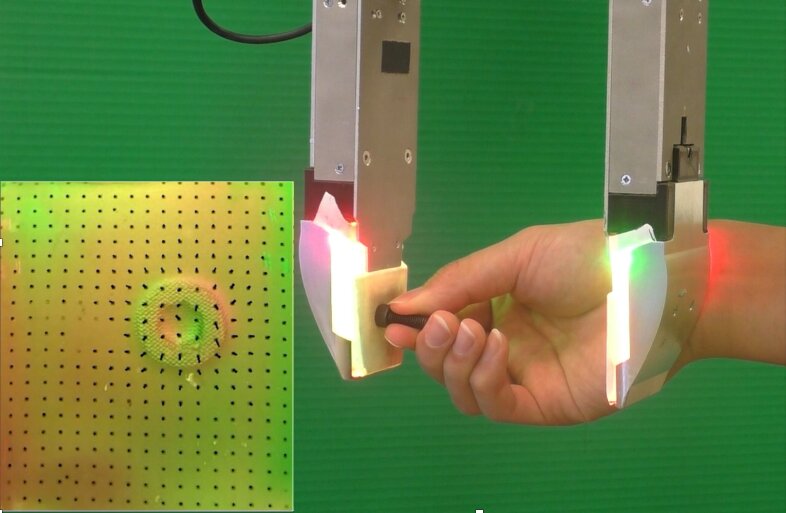
Нова методика навчається на моделюванні і невимагає великого збору даних. Спочатку дослідники розробили структуру, яка імітує контакти між заданим об'єктом і тактильним датчиком, за умови, що робот матиме доступ до даних про об'єкт, з яким він взаємодіє (наприклад, про його тривимірної формі, властивості і т. Д.).
Далі дослідники використали сучасніметоди машинного навчання для комп'ютерного зору та навчання репрезентації, щоб зіставити реальні тактильні спостереження, зібрані роботом, із набором контактів, створеним у процесі моделювання.
По суті, метод, розроблений цією групоюдослідників може моделювати контактну інформацію просто на основі тривимірної форми об'єкта. В результаті не потрібно жодних попередніх тактильних даних, зібраних при ретельному вивченні об'єкта. Це дозволяє методиці генерувати оцінки пози для об'єкта з першого дотику тактильних датчиків робота.
Читати далі
Земля досягне критичної позначки температури через 20 років
Аборти і наука: що буде з дітьми, яких народять
Названа рослина, якій не страшна зміна клімату. Їм харчується мільярд людей