Професор Едвард Андерсон з Массачусетського технологічного інституту та його аспірантка Сандра Лю
Захоплення складається з двох гнучких ребристих пальців,які адаптуються до форми об'єкта, з яким вони стикаються. Ці пальці, як і в багатьох аналогічних розробках, виготовлені із гнучких пластикових матеріалів на 3D-принтері. Однак у своєму роботі інженери видалили поперечні ребра, розташовані на внутрішній стороні пальців і надають їм жорсткості. Натомість дослідники встановили камеру та датчики.
На зовнішній стороні порожнини встановлюється тонкийакриловий лист, до якого прикріплюються «чутливі» подушечки із силіконового гелю. У глибині порожнини розміщується камера, спрямована у бік акрилового шару, а вся порожнина висвітлюється світлодіодами.
При торканні предмета палець плавно охоплюєйого, зливаючись із контурами об'єкта. Камера та спеціальні алгоритми аналізують зміну силіконового та акрилового листів. На основі аналізу робот визначає загальну форму об'єкта, нерівності поверхні, орієнтацію об'єкта у просторі та силу, з якої необхідно стискати предмет.
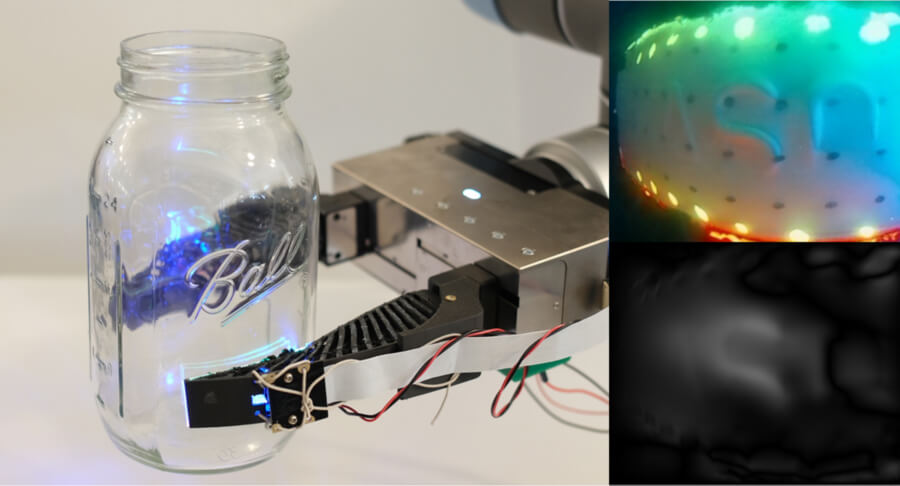
Дослідники протестували роботу свогозахоплення, зробивши сенсорним лише один із двох пальців. Створений ними пристрій успішно маніпулював різними предметами, наприклад міні-викруткою, пластиковою полуницею, тюбиком з фарбою і келихом для вина. При цьому при захопленні полуниці внутрішній датчик зміг успішно виявити зернистість поверхні, а при роботі з банкою - прочитати вигравіровану назву.
 Джерело: Лабораторія інформатики та штучного інтелекту MIT
Джерело: Лабораторія інформатики та штучного інтелекту MIT
Як зазначають автори роботи, скляні об'єктиє складне завдання для сенсорів на основі комп'ютерного зору через заломлення світла. Тактильні датчики дозволяють оминути це обмеження. Коли захоплення піднімало келих, він відчував орієнтацію ніжки в просторі і міг переконатися, що склянка спрямована вгору, перш ніж опустити її на стіл.
Інженери зазначають, що створення порожнини всерединіпальця трохи порушило стабільність захоплення. Вчені планують доопрацювати дизайн свого пристрою, щоб усунути цей недолік. Крім того, вони планують розробити захоплення з трьома пальцями, яке зможе, наприклад, збирати шматочки фруктів та оцінювати їхню зрілість.
Читати далі:
У MIT створили нерухомий тепловий двигун, який перевершив ККД турбін
Через десять років роботи вчені засумнівалися у стандартній моделі фізики
Подивіться, як виглядає схід Сонця на Марсі