Що таке м'які роботи?
М'яка робототехніка - це особлива область робототехніки, яка займається
М'яка робототехніка багато в чому залежить від того,як живі організми переміщаються і адаптуються до свого оточення. На відміну від роботів, побудованих з жорстких матеріалів, м'які роботи забезпечують підвищену гнучкість і адаптованість для виконання завдань, а також підвищену безпеку при роботі з людьми. Ці характеристики дозволяють використовувати його в медицині та виробництві.
М'яка робототехніка в основному конструюєроботів повністю з м'яких матеріалів. У підсумку виходять роботи схожі на таких безхребетних, як черв'яки або восьминоги. Моделювання руху таких роботів - складне завдання. Справа в тому, що для таких процесів необхідно застосовувати методи механіки суцільного середовища. Саме тому м'які роботи іноді називають роботами суцільного середовища (continuum robots).
Нагадаємо, механіка суцільних середовищ - розділмеханіки, фізики суцільних середовищ та фізики конденсованого стану, присвячений руху газоподібних, рідких та деформованих твердих тіл, а також силовим взаємодіям у таких тілах.
Гібриди м'яких і жорстких роботів
Для вивчення біологічних явищ вчені створюють м'яких роботів за образом живих організмів і проводять експерименти, які складно виконувати на справжніх організмах.
Проте, існують жорсткі роботи, які також здатні до безперервним деформацій, наприклад, робот-змія.
М'які конструкції можуть використовуватися як частинабільшого жорсткого робота. М'які Ефектори роботів для захоплення і маніпулювання об'єктами забезпечують перевагу. Справа в тому, що вони не руйнують тендітні об'єкти.
Також можливе створення гібридних м'яко-жорсткихроботів, у яких є внутрішній жорсткий каркас і зовнішні м'які елементи. М'які елементи можуть мати багато функцій: як впливають механізми аналогічні м'язам тварин, так і пом'якшувальний матеріал для забезпечення безпеки при зіткненні з людиною.
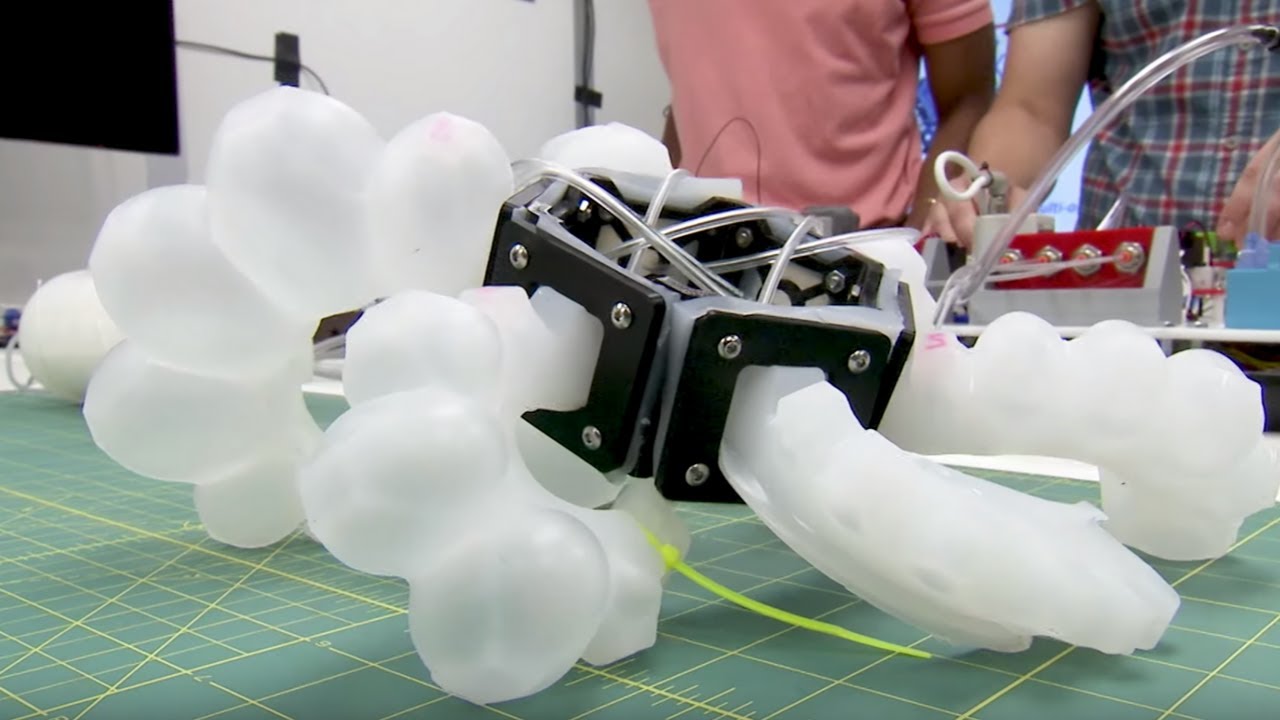
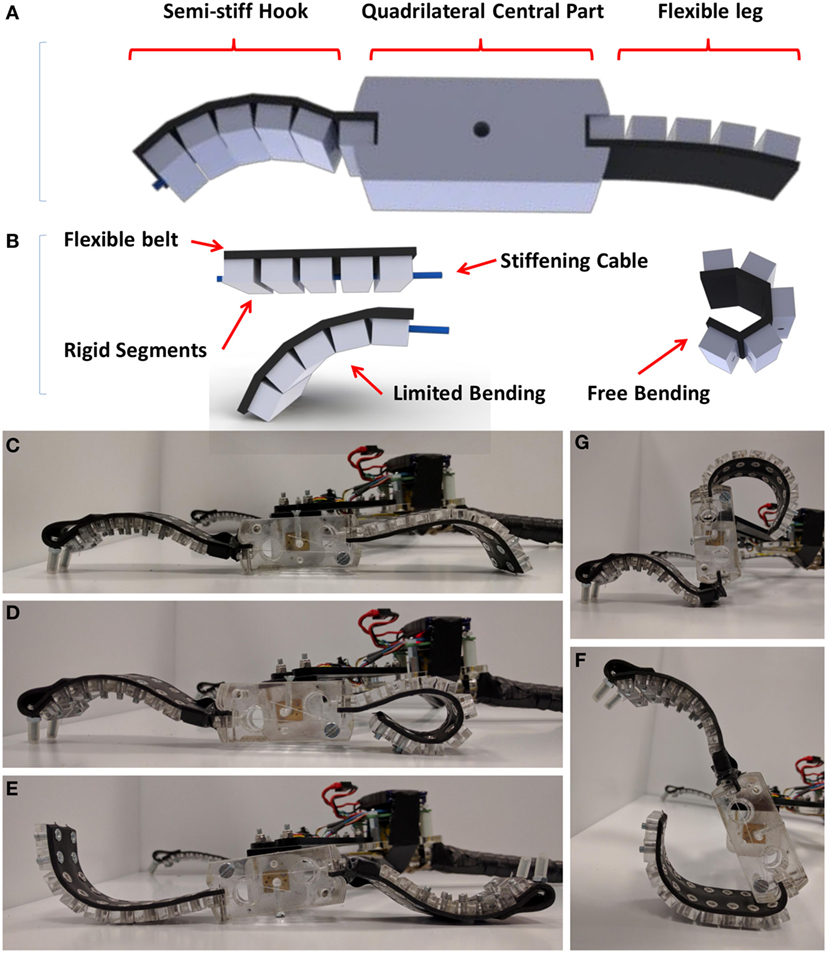 Робот на колісній основі з м'якими ногами та здібностями пересування землею.
Робот на колісній основі з м'якими ногами та здібностями пересування землею.
Фото: Алі Садегі, Алессіо Мондини, Емануель Дель Дотторе, Ананд Кумар Мішра і Барбара Маццолай
М'яких роботів можна згинати, надавати будь-якуформу. Вони виготовлені з дуже м'якого матеріалу, у тому числі з наноматеріалів. Це робить їх більше схожими на людські частини тіла, наприклад, на м'язи. Насправді можна сказати, що ці роботи майже оживають за допомогою наноматеріалів.
Незважаючи на безліч досліджень в області м'яких роботів, інженери поки що на самому початку шляху. Проте експерти прогнозують, що вже до 2024 року їхній ринок досягне $2,16 млрд.
Чим м'які роботи відрізняються від звичайних?
Металеві роботи набагато більш обмежені. Вони були сконструйовані з урахуванням швидкості і точності, що робило їх ідеальними для таких речей, як робота на конвеєрі. Але вони не так уже й універсальні.
М'які роботи відрізняються від промислових абоколлаборатівного роботів тим, що їх конструкція зроблена з м'яких, піддатливих матеріалів. Їх конструкція сильно відрізняється від будь-якої іншої форми роботів, і аналогічно м'які роботи виконують дуже різні функції.
Здебільшого м'які роботи все ще знаходятьсяна ранніх стадіях розробки, і найперший м'який робот був розроблений в 2011 році професором Гарварду Джорджем Уайтсайдс. З тих пір кількість і типи м'яких роботів різко зросли. Хоча до їх реальної комерційної життєздатності може бути кілька років, вони як і раніше представляють собою захоплюючу технологію з великим потенціалом.
М'які роботи - захоплююча інновація в світіробототехніки. Вищезазначені п'ять типів м'яких роботів можуть мати найбільший комерційний потенціал з усіх типів м'яких роботів, які в даний час розробляються.
На відміну від промислових або коллаборатівного роботів, м'які роботи обслуговують широкий спектр додатків.
Як застосовуються м'які роботи?
Привабливість м'яких роботів полягає в їх гнучкості і універсальності.
6 багатообіцяючих типів м'яких роботів
Існує багато різних типів м'яких роботів, але є 6 різних додатків, які обіцяють найбільший комерційний потенціал.
- Роботизовані м'язи: зараз розробляються кілька типівм'яких роботів, які будуть працювати як роботизовані м'язи. Один із найперспективніших прототипів черпає натхнення з орігамі. Його складена конструкція може піднімати вагу в 1 000 разів більше власної ваги і масштабується від декількох міліметрів до метра в довжину. Крім того, зараз вчені працюють над створенням нанорозмірних роботів з ДНК.
- Альпіністські роботи:у цих типів роботів є багато потенційнізастосувань, починаючи від огляду та обслуговування будівель і закінчуючи пошуково-рятувальними операціями. Одна з версій роботів для м'якого лазіння має вигнуту конструкцію, дуже схожу на гусеницю. Це дозволяє йому повзати вгору і вниз по спорудах різного розміру.
- Їстівні роботи. Перший проект таких роботів.створений шкільною командою в Філадельфії для щорічного конкурсу Soft Robotics. Ці біорозкладні роботи можуть безпечно доставляти ліки до різних частин тіла.
- Роботи, що носять.Ці біоміметичні пристрої можуть допомогтипацієнту, який проходить фізичну реабілітацію. М'який робот імітує природні рухи тіла, де б він не знаходився, допомагаючи пацієнтові відновити нормальні рухові функції.
- Роботи-протези.М'які роботи можуть використовуватись для створеннячудових протезів для людей, у яких відсутні кінцівки чи частини тіла. Часто технологія м'якої робототехніки використовується на кінці протеза руки для більш делікатного та точного захоплення об'єктів.
- Роботи-космонавти. Учені НАСА припускають, що одного разу вони літатимуть по поверхні Марса. Інші вже проектують роботів, які працюватимуть у важкодоступних частинах людського тіла.
Хоча м'які роботи також можуть використовуватися впромислових умовах - особливо в якості коллаборатівного роботів (також відомих як «коботи»), які працюють разом з людьми, вони навряд чи обмежуються цим.
Перший в світі м'який автономний робот
У 2016 році вчені з Гарварду використалирідку силіконову гуму для розробки Octobot - першого в світі м'якого автономного робота. Натхненні восьминогами ці м'які роботи можуть крутитися і долати перешкоди, які можуть виявитися неможливими для різких, жорстких металевих роботів, подібних до тих, що зображені в «Термінаторі» або «Зоряних війнах».
Дивно, але Octobot дешевше у виготовленні,ніж латте, а заправка його паливом коштує всього 5 центів. Можна уявити сотні дешевих м'яких роботів, яких відправляють досліджувати місце події, долати перешкоди і вузькі місця, щоб допомогти в рятувальній операції.
«Основна мета м'якою робототехніки -не створюватинадточні машини, тому що вони у нас вже є, - сказала біомедичний інженер Джада Гербоні в своєму виступі на TED в 2018 році. - А зробити роботів здатними протистояти несподіваних ситуацій в реальному світі ».
М'які роботи в медицині
М'які роботи можуть використовуватися в якостіхірургічних та медичних інструментів (зокрема ендоскопів). Їх перевага в тому, що вони переміщаються по структурам тіла легше, ніж це можуть робити традиційні інструменти. Це дає лікарям більш чітке уявлення про ту галузь тіла пацієнта, яку вони хочуть досліджувати.
Повністю м'яка роботизована одяг, яка може допомогти людям пересуватися, стала на крок ближче до реальності завдяки розробці нової гнучкої та легкої системи харчування для м'якої робототехніки.
Відкриття, зроблене групою з Брістольськогоуніверситету, може прокласти шлях до допоміжних пристроїв для людей з обмеженими можливостями і людей, які страждають віковою дегенерацією м'язів. Дослідження опубліковано сьогодні уScience Robotics.
 Новий тонкий і легкий насос розміром з кредитну карту. Надано: Тім Хелпс, Брістольський університет.
Новий тонкий і легкий насос розміром з кредитну карту. Надано: Тім Хелпс, Брістольський університет.
М'які роботи зроблені з м'яких матеріалів,які можуть розтягуватися і скручуватися. З цих матеріалів можна зробити штучні м'язи, які скорочуються, коли в них нагнітається повітря. М'якість цих м'язів дозволяє використовувати допоміжну одяг. Однак до сих пір ці пневматичні штучні м'язи приводилися в дію звичайними електромагнітними (приводними від двигуна) насосами, які є громіздкими, галасливими, складними і дорогими.
Дослідники з Бристольской лабораторії SoftLabі Бристольской лабораторії робототехніки під керівництвом професора робототехніки Джонатана Россітера успішно продемонстрували новий електропневматичний насос, який є м'яким, гнучким, недорогим і простим у виготовленні.
У статті команда описує, як новий м'якийнасос розміром з кредитну карту може приводити в дію штучні м'язи з пневматичним міхуром і перекачувати рідини. Команда також описує в загальних рисах свої наступні кроки, щоб зробити потужну одяг реальністю.
Точно так же полімери титану на основі вуглецюможна використовувати в поєднанні з синтетичними полімерами для створення ультратонких штучних м'язів. Ця технологія була продемонстрована в художніх репродукціях танцюючих метеликів, тріпотливих листя і квітучих квітів в Корейському передовому інституті науки і технологій.
Як працюють м'які роботи?
М'які роботи, особливо розроблені дляімітації життя, часто мають відчувати циклічну навантаження при переміщенні або виконанні будь-яких інших завдань. Наприклад, в разі робота, схожого на міногу або каракатиці, описаного вище, для руху буде потрібно електроліз води і займання газу, що призведе до швидкого розширення для просування робота вперед. Це повторюється і вибуховий розширення і стиснення створить інтенсивну циклічну навантаження на обраний полімерний матеріал. Робота під водою на Європі було б практично неможливо полагодити або замінити, тому необхідно подбати про вибір матеріалу і конструкції, які зводять до мінімуму виникнення і поширення втомних тріщин. Зокрема слід вибирати матеріал з межею витривалості або частотою амплітуди напруг, вище якої усталостная характеристика полімеру більше не залежить від частоти.
Оскільки м'які роботи виготовлені з м'якихматеріалів, необхідно враховувати температурні ефекти. Межа плинності матеріалу має тенденцію до зниження з температурою, а в полімерних матеріалах цей ефект ще більш відчутний. При кімнатній і більш високих температурах довгі ланцюги в багатьох полімери можуть розтягуватися і ковзати уздовж один одного, запобігаючи локальну концентрацію напружень в одній області і роблячи матеріал пластичним. Але більшість полімерів зазнають температуру переходу з пластичного в крихкий стан нижче якої не вистачає теплової енергії для того, щоб довгі ланцюги реагували таким пластичним чином, і руйнування набагато більш імовірно. Вважається, що тенденція до того, що полімерні матеріали стають крихкими при більш низьких температурах, є причиною катастрофи шаттла "Челленджер", і до неї слід ставитися дуже серйозно, особливо для м'яких роботів, які будуть впроваджуватися в медицині. Температура переходу з в'язкого стану в крихкий не обов'язково повинна бути такою, яку можна вважати «холодної», і фактично є характеристикою самого матеріалу в залежності від його кристалічності, ударної в'язкості, розміру бічної групи (в разі полімерів) і інших чинників.
недоліки технології
М'які роботи не позбавлені недоліків.Зокрема вчені виявили, що приводи рідини — пристрої, які фактично пожвавлюють роботів — повільно включаються через величезну кількість рідини, необхідну для руху, або через те, що їхній потік уповільнюється різними структурами всередині пристрою (наприклад, трубки та клапани) .
Однак дослідники з Гарварду розробляютьобхідний шлях. Відзначаючи, що згинання таких іграшок призводить до вивільнення великої кількості енергії, вони конструюють приводи з двома висувними кришками, одна всередині іншої. Коли зовнішня кришка надувається, тиск збільшується на внутрішню. Коли вона згинається, вивільнення енергії призводить в рух пристрій.
У м'яких роботів є потенціал, якийпростягається до Марса і назад, і вони, безсумнівно, стануть більшою частиною суспільства в найближчі роки. Їх можливості обмежені тільки людською уявою.
М'які роботи і люди
Роботи з м'яким тілом пропонують можливість длясоціального і тактильного взаємодії між людиною і роботом, які вимагають ретельного розгляду можливості недоречних емоційних прихильностей, а також особистого і соціально руйнівного поведінки користувачів. Етичні проблеми, пов'язані із взаємодією людини і робота, і то, як вони повинні сприяти проектування м'якої робототехніки в контексті соціальної взаємодії, обговорюються в статті для журналу Soft Robotics.
Томас Арнольд і Маттіас Шойц, Університет Тафтса,Медфорд, Массачусетс, є співавторами статті під назвою «Тактильна етика м'якою робототехніки: розумне проектування для взаємодії людини і робота». Вони досліджують широке коло тем, в тому числі здатність м'яких роботів стосуватися навколишнього середовища і взаємодіяти з нею, потенційні ризики формування односпрямованих емоційних зв'язків людини з роботами і того, для чого повинні бути призначені соціальні роботи. Щоб проілюструвати деякі з етичних проблем, пов'язаних з м'якою робототехнікою, і можливі ризики для суспільства, автори обговорюють приклад секс-роботів.
Доктора Арнольд і Шойц пропонують три загальнихпринципу розробки м'якої робототехніки в контексті соціального людини і робота. Вони спонукають співтовариство м'якої робототехніки вирішувати ці етичні проблеми як спосіб підвищення якості та ефективності взаємодії людини і робота. «Технологія м'яких роботів скоро принесе нам машини, які безпосередньо взаємодіють з людьми; важливо, щоб ми почали думати про вплив, який вони можуть мати на соціальні ситуації. У цьому документі викладені деякі з основних проблем і даються відмінні рекомендації для серйозного обговорення взаємини людини і робота », - робить висновок Баррі А. Тример, доктор філософії, який керує лабораторією нейромеханікі і биомиметических пристроїв в Університеті Тафтса (Медфорд, Массачусетс).
Читати також
Створено першу точна карта світу. Що не так з усіма іншими?
Подивіться на фотографії планетарних туманностей, зроблені «Хабблом».
Фізики створили аналог чорної діри і підтвердили теорію Хокінга. До чого це призведе?