Хто такі роботи?
Кілька років тому на Reddit з'явилася класна штука - вчені описували складні
Робототехніка - це синергетична прикладнасфера діяльності. Вона складається з програмування, мехатроніки та кібернетики. Мехатроніка це те, що взаємодіє з реальним світом. А кібернетика — багатоланкова наука, яка включає, насамперед, управління створеними програмами.
Що таке робот?15 років тому багато хто б сказав, що це робот-маніпулятор, який працює на заводі і займається зварюванням або фарбуванням. Інша популярна відповідь - це робот-андроїд зі світу кіно. Але чи є роботом рухомий візок чи безпілотний автомобіль? Так, це також одна з областей роботехніки. Літальні апарати — теж роботи, одні з останніх розробок включають інтелектуальні технології і є, по суті, автономними роботами.
 Рухливий візок - це теж робот
Рухливий візок - це теж робот
Ще є така область робототехніки, як fieldrobotics - "мобільна робототехніка". Сюди включають усіх роботів, які рухаються у полі, будівлі чи під водою. Найцікавіше застосування, на мій погляд, це сільське господарство.
Історія літальних апаратів
Історія літальних апаратів розпочалася у минуломувіці. До цього літали лише повітряні кулі без двигуна, і їх важко було назвати роботами. На початку минулого століття функціонували два типи літальних апаратів — дирижаблі та літаки. Перший керований політ здійснили брати Райт. Причому перший автопілот з'явився досить швидко, через 10 років після цього, він допомагав стабілізувати політ.
Поточний напрямок робототехніки пов'язаний зрозвитком та доступністю нових відкритих автопілотів, таких як PixHawk (PixHawk – відкрите апаратне забезпечення для контролерів, дронів та інших БПЛА. Його використовують для академічних, аматорських та професійних цілей). Приклад приходу дронів у життя кожної людини – доставка піци компанією «Додо Піца» разом із «Коптр експрес» – це сталося у 2014 році.
 Історія летальних апаратів
Історія летальних апаратів
Як керується дрон
Сучасні літальні апарати використовують одиніз трьох принципів створення підйомної сили — аеростатичний, реактивний чи аеродинамічний. Аеродинамічний принцип польоту та створення підйомної сили (відкидання вниз частини повітря) можна реалізувати або за рахунок руху всього апарату, з нерухомою несучою поверхнею (крило), або за рахунок руху окремих несучих частин апарату (несучий гвинт, вентилятор) щодо повітряного середовища.
 Як літають пристрої
Як літають пристрої
Дрон має гвинт, який створює підйомну тягу.Відірвавшись від землі, пристрій починає рухати гвинтом швидше і піднімається нагору. Але сила дії дорівнює силі протидії. При обертанні гвинта створюється момент в інший бік – з цим пов'язана конструкція вертольотів та коптера. Якщо у вертольота буде один гвинт, він не буде стабільним. Тому пристрій використовує або схему з двома гвинтами або хвостовий гвинт.
У квадрокоптері дуже проста конструкція - уйого зазвичай чотири гвинти, два з яких обертаються в один бік, а два в інший. Якщо користувачеві потрібно рухатися вперед, то одні гвинти обертаються повільніше, а інші швидше. А якщо користувач хоче повернути, то одні гвинти, розміщені на діагоналі, прискорюються, а інші — сповільнюються.
 Як літає квадрокоптер
Як літає квадрокоптер
Рухи коптера по кутах пов'язані з рухом покоординат. Якщо пілот хоче рухатися вперед, потрібно спочатку нахилити дрон вперед, а потім, коли пристрій на електротязі потягнеться вперед, стабілізувати його в тій точці, де хочемо залишитися.
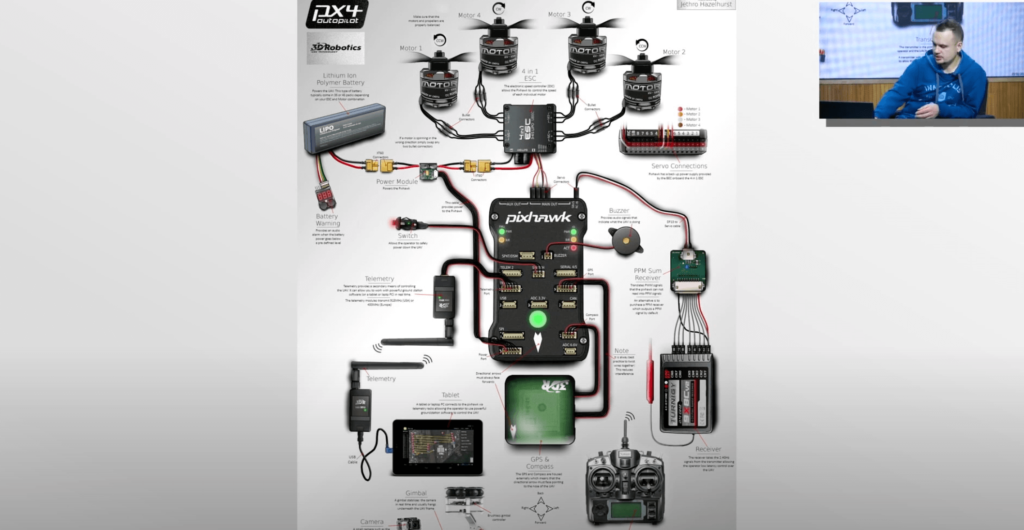
Це схема одного з найпопулярніших автопілотів,на основі якого можна створити нові пристрої. Він підключається до всіх моторів та датчиків. Причому мотори мають свій блок управління, регулятор ESC — Electronic Speed Controller, керуючий оборотами мотора.
З сенсорів тут є GPS, щоб дрон мігпрацювати поза приміщеннями, літати по точках та стабілізувати становище. Але всередині автопілота також є IMU — модуль інерційних датчиків, який дозволяє йому визначати кути орієнтації. Також є канал зв'язку, наземний пункт керування та батарея.
 Пристрій БПЛА
Пристрій БПЛА
Як говорилося вище, існує певний рівенькерування двигуном - ми, вже не замислюючись, можемо задати швидкість обертання. За тим самим принципом працюють інші рівні: наступний — це управління орієнтацією.
Але перш нам потрібно керувати швидкістю обертання- на цьому рівні літають FPV-коптери (пристрої, які дозволяють спостерігати за картинкою з камери дрона в режимі реального часу від першої особи (FPV - First Person View). Досвідчені пілоти задають швидкість обертання і постійно підрулюють джойстиком. Наступний етап - коли користувач може стабілізувати кут, але при цьому дрон все одно рухатиметься, далі - контроль швидкості, а найвищий - це позиційне керування, маневри для руху в точку або рух по заданій траєкторії.
Ті, хто хочуть програмувати, збирати такерувати дронами – повинні звернути увагу на opensource-автопілот PIX4. Навколо повітряної роботехніки є ціла спільнота (ROS - robotic operating system, або Open robotics), є симулятори для дронів. Тому багато експериментів можна зробити в симуляторі, не маючи самого дрону.
Стадії розробки дрону
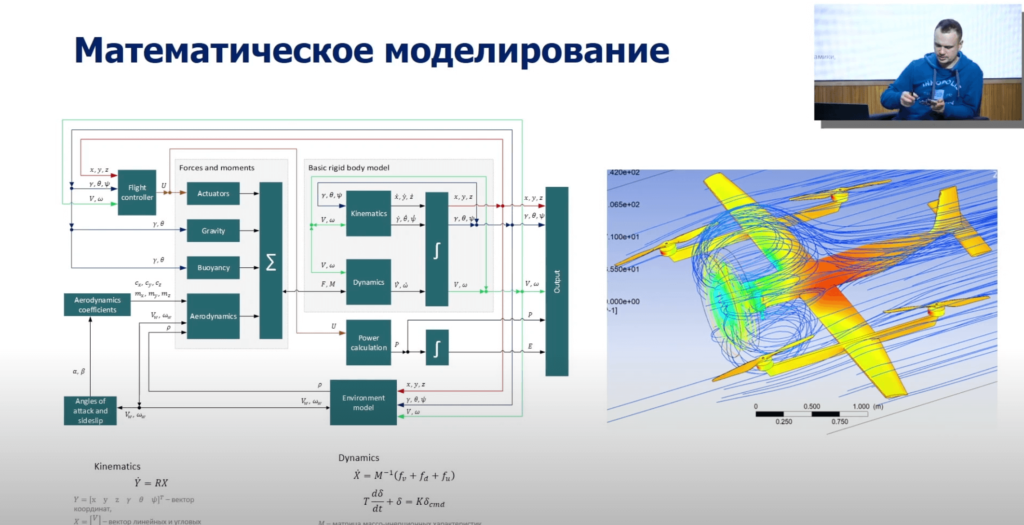
Дослідники починають з концептуальногомоделювання, а потім їм потрібно побудувати точну модель апарату. Не заглиблюючись у формулу, модель коптера - це, по суті, модель твердого тіла. Це другий закон Ньютона, розширений системи частинок. Він має поступальний і обертальний рух, є кінематика та динаміка руху, а щоб описати модель конкретного апарату, ми повинні додати сюди рівняння сил, що діють на конкретний дрон.
 Як моделюють БПЛА
Як моделюють БПЛА
Наступним етапом є розробка системиуправління. Якщо йти класичним способом: спочатку ми дізнаємося про точну математичну модель і на її основі вже синтезуємо алгоритм управління або нові формули. У систему управління можна включати всі рівні: планування руху, сприйняття середовища, оцінювання стану за допомогою датчиків. Алгоритми дозволяють уточнювати наші координати та дані.
 Система керування дронами
Система керування дронами
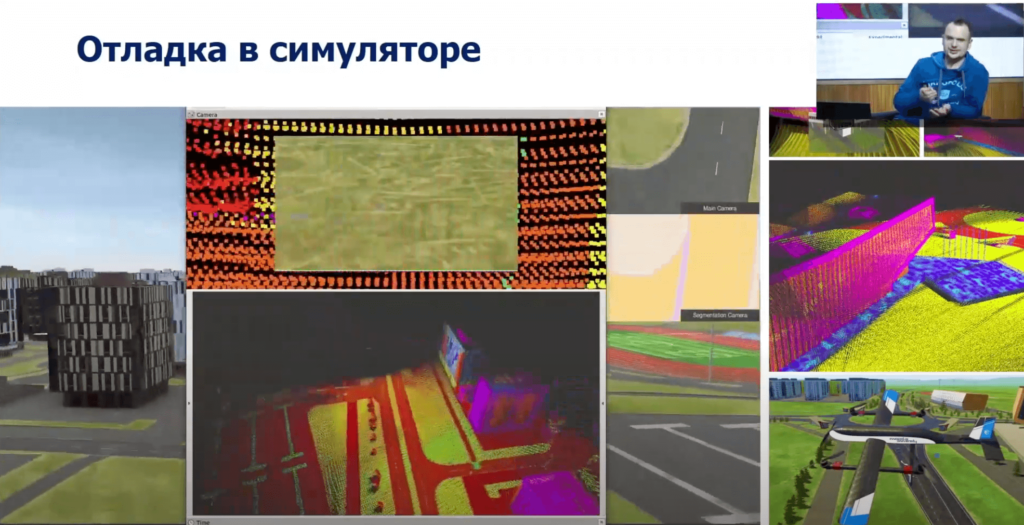
Коли є алгоритм управління, його можна одразузастосовувати, але робити це досить затратно. Пристрої падають при найменшій помилці - це треба враховувати і робити резервні копії. Для тестування використовують симулятори.
Нижче показана віртуальна екскурсія Іннополісом— продукт нашого університету, він доступний для завантаження на GitHub. Це не лише візуальна складова, а й дані всіх датчиків апарату. Він має всі позиційні датчики, ним управляють як дроном і можуть налагоджувати всі алгоритми управління.
 Так дрони навчаються у симуляції
Так дрони навчаються у симуляції
Коли на основі досвіду із симулятором з'являєтьсябільше впевненості можна переходити до апаратної реалізації. Тут показано її складові: виготовлення апарату з карбону та композиту, створення електроніки, розміщення двигунів, їх кріплення.
Тести починаються не на вулиці:спочатку пристрої тестуються на підвісі чи спеціальному стенді. Там можна налагоджувати елементи функціонування безпілотного літального апарату. Наприклад, тут показаний літак вертикального зльоту і посадки - це гібрид коптера і літака, на відео можна побачити, як він справляється із зовнішніми обуреннями і тримає кут. Справа показаний досить шалений експеримент, коли запускають п'ять двигунів одночасно і дивляться, як система управління справляється з цим.
 Так будують дрони
Так будують дрони
Після тестування переходять до підльотів.невеликі злети на невеликих швидкостях, керований рух із пілотом, який може перехопити контроль. Фінальним акордом є повністю безпілотний політ.
Пристрій злітає вертикально."по-коптерному", потім у нього включається маршовий двигун, безпілотник розганяється, переходить у літаковий режим, розвиває достатню швидкість, щоб працювало крило. Потім контурні гвинти вимикаються, і він летить самолітним - процес посадки здійснюється в зворотній послідовності.
Що відбувається з безпілотниками
Одне із завдань, над яким працюють сучаснівчені - обхід перешкод під час польоту. Деякі дрони вже вміють це, але завдання коштує трохи ширше - треба навчити пристрої якнайшвидше рухатися в середовищі з перешкодами. І тут, як і раніше, є куди прагнути і покращувати алгоритми.
Ще один приклад такого тестування — політ уліс. Є дуже цікавий підхід — тут використовуються не лише нові алгоритми, а й сенсорика — івенткамера. Це дуже високочастотна камера, яка передає різницю між кадрами у кожну одиницю часу: це дозволяє швидко здійснювати керування та реагувати на перешкоди.
В області планування руху дрону проводятьсязмагання: хто швидше це зробить. Завдання полягає в тому, щоб картографувати невідому область, побудувати її тривимірну виставу, знайти на ній об'єкти. Ми літали в університеті, але також вирішували завдання пошуку об'єктів. Наші результати були навіть кращими, ніж у відомих опублікованих алгоритмів.
Існують змагання і з гонки дронів.Вони робляться на пристроях з камерою, коли пілот має окуляри і він керує дроном, щоб максимально швидко пролетіти через ворота. Досить видовищний захід, де те саме завдання треба виконати і в автоматичному режимі. На жаль, поки що комп'ютеру вдалося перемогти людину лише у шахи, а робот-дрон не зміг обігнати людину-пілота, хоча прогрес уже досить серйозний. Дрон за допомогою алгоритму машинного зору може виконувати такі завдання, робота йде лише збільшення швидкості.
Ще одне змагання - Microsoft Games ofdrones, воно проводиться у симуляторі. У цій же області проводиться одне з найвідоміших провідних змагань у Саудівській Аравії. Учасники там набираються на три роки наперед.
Безпілотні пристрої використовують для шоу дронів— це видовищні заходи, які сьогодні стали заміною на салюти. Але це не єдине групове застосування - вони можуть перевіряти велику область.
Де застосовують
Щоб це не виглядало як виключно науковірозробки, нижче - демо дрона Skydio. Зараз це найдосконаліший пристрій щодо автономності. Це приклад того, як сучасні технології — картографія, обхід перешкод, планування руху використовуються спільно вже доступному для користувача продукті.
Ще один напрямок – це нові конструкції.літальних апаратів. Одне з них - складні дрони. Один такий пристрій може залітати у вузькі місця для інспекції після аварії. Інший приклад - дрон, який може розкладатися. Наприклад, він уміє вилітати з вузької пневматичної труби і далі летіти у звичайному режимі.
Ми також маємо проект у цій галузі — цем'який Tensodrone. Це перший дрон м'якої конструкції, що літає. Задоволення полягає в тому, що його можна упускати і він залишиться цілим. Крім того, можна змінити довжину балок, натяг тросів.
Два приклади, які втіляться в життяНайближчим часом. По-перше, доставка за допомогою дронів. Зараз є дуже цікава реалізація, коли ми поєднуємо поштамат і посадкову станцію дрону — у цьому випадку не потрібно дбати про те, коли дрон прилетить, куди він сяде, щоб ми до нього вийшли вчасно, забрали вантаж, доки його не вкрали. Другий приклад - таксі, що літає. Це вражаюча область розробок, вже є працюючі прототипи. Але це відбудеться лише найближчим десятиліттям.
Які розробки в області таксі з'являлися за останні 6 років:
— Компанія «Ховер» представила апарат змалошумним електродвигуном та компактними габаритами - як у автомобіля. Він злітає на висоту 150 м і сідає на стандартне місце для паркування. Дрон розрахований на двох пасажирів, максимальна вантажопідйомність – 300 кг, а швидкість – 200 км/год.
- У 2016 році російська компанія Hoversurfпоказала ховербайк, який можна носити з собою і будь-якої миті злетіти зі звичайного міського паркувального місця. Він розвиває швидкість до 100 км/год, а висота підйому примусово обмежена 5 метрами з метою безпеки.
- У 2018 році розроблений Airbus пасажирськийVTOL-літак Alpha One піднявся на висоту 5 метрів і протримався у повітрі 53 секунди. Користувач зможе викликати БПЛА через додаток і дістатися з однієї точки в іншу як у межах міста, так і за його межами.
— 2020 року аеротаксі CityAirbus здійснилоперший вільний політ. Тестування відбулося в передмісті Парижа, місті Іль-де-Франс. Літальний апарат CityAirbus здатний пересуватися зі швидкістю до 120 км/год на відстань до 30 км. Вага літаючого таксі — понад 2,2 т, CityAirbus обладнано трьома пасажирськими місцями та одним водійським.
- У 2022 році китайський стартап Pantuo Aviation представив T1 - це демонстратор літаючого таксі з повітроводом. Він літатиме зі швидкістю понад 300 км/год, а дальність польоту становитиме 250 км.
Читати далі:
Космічний зонд пролетів за 200 км від Меркурія. Подивіться, що він побачив
Вчені розкрили, як вітаміни впливають на захворюваність на рак
Китайський шолом для «читання думок» б'є на сполох, коли людина бачить порноконтент