The authors of the new work hypothesized that models are best trained using prediction
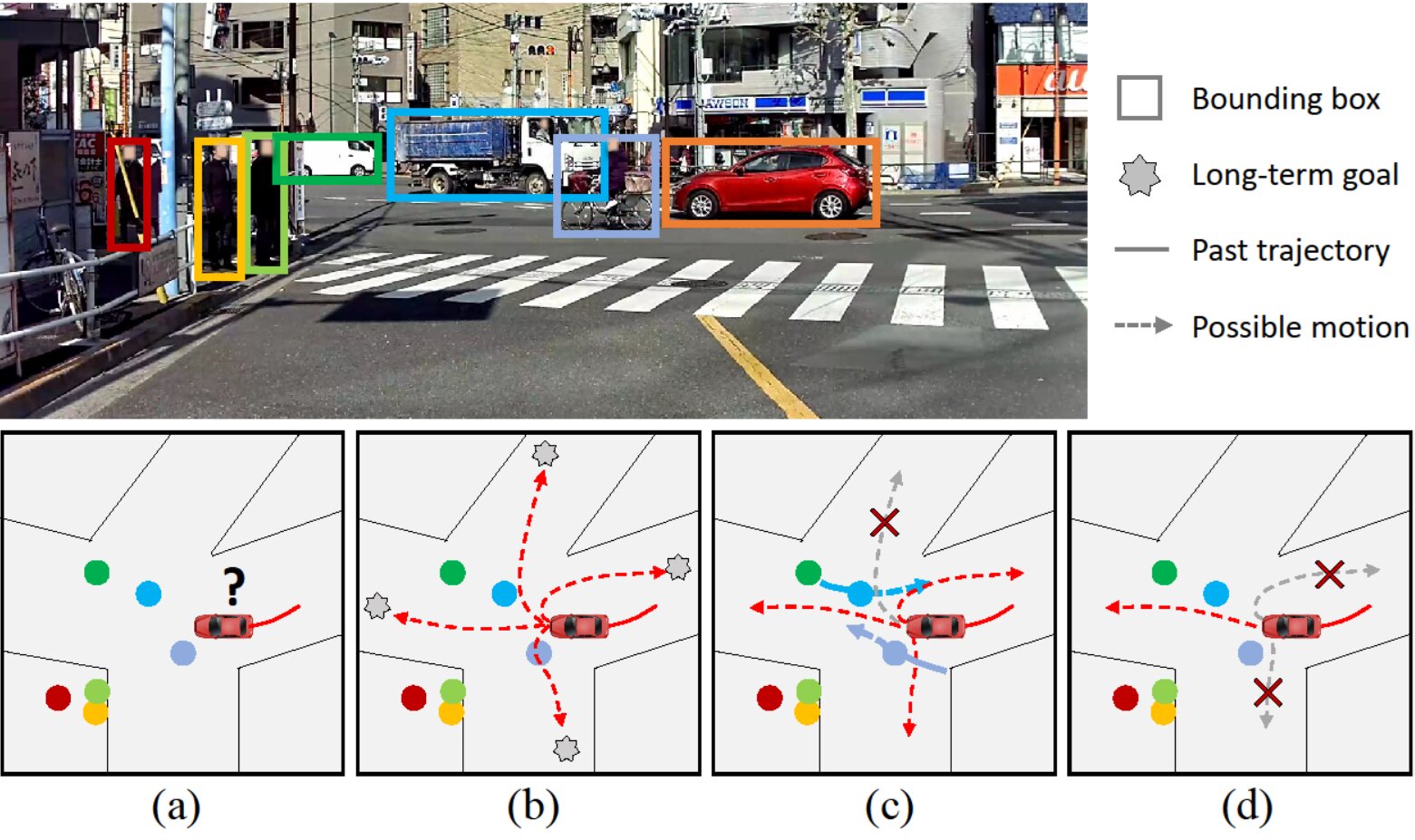
The researchers plan to develop an architecture that considers both short-term and long-term goals—these are the main components when assessing the intentions of a pedestrian or a car.
For example, there is a car that is at an intersectionwants to turn left. It is important to take into account not only the dynamics of transport, but also how the intention can change depending on various factors: due to one's own desire, other road users or obstacles.
Next, the algorithm first encodes the past experiences on which the model was trained to predict what the long-term and short-term consequences might be.
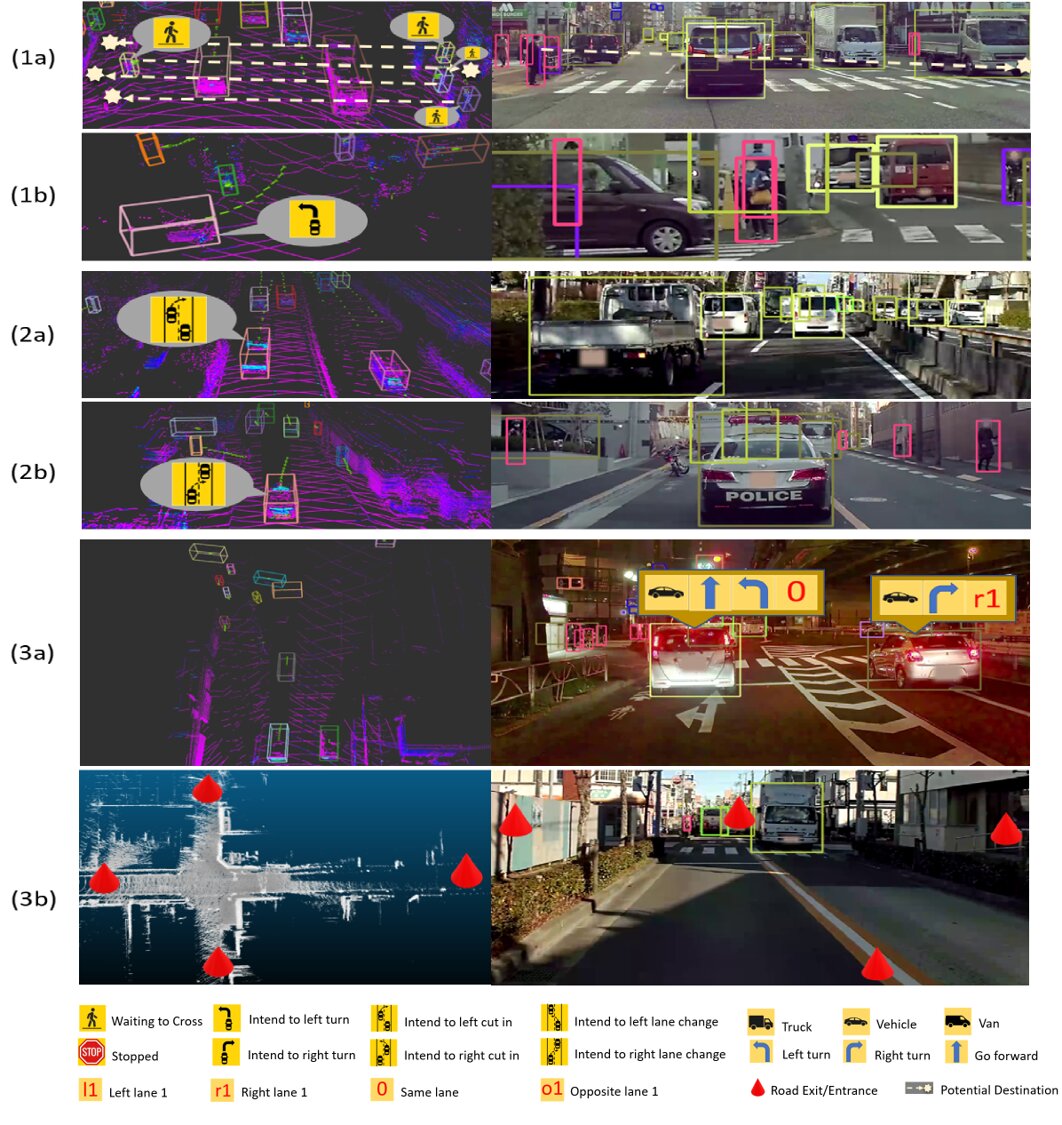
The model assigns to all surrounding objectscues are “intentions” that can change along the way, “environment” such as road signs and trees that influence agents’ intentions, and “contextual cues” such as weather and road conditions.
The researchers evaluated their model in a series of tests and found that it outperformed other state-of-the-art trajectory prediction methods by 27%.
The developers believe that the model can beused to improve the safety and performance of autonomous vehicles. In addition, other research groups can use the LOKI dataset to prepare their own models to predict the paths of pedestrians and vehicles on the road.
To read Further:
New iOS 15: release date, iPhone design and features. We tell everything that is known
An ultra-thin material was made from white graphene. It will replace servers
See a heavy attack drone that carries a ton of weapons