Researchers from the University of Illinois at Urbana-Champaign and Princeton University used
The scientists used tiny spiralactuators that mimic the work of the muscles in the thorax of the click beetle. An artificial actuator pulls on a tiny beam, causing the robot to slowly flex and store elastic energy. Once released, this energy pushes the robot up.
In previous studies, scientists have found thatthe click beetle has a special spiral muscle. It stores energy and is triggered, for example, when an insect rolls onto its back. Under the action of a sharp straightening of this muscle, the body of the beetle throws up to a great height, several times its size. The same mechanism works for robots.
One of the main challenges of small-scale robotics is to find a design that is small but powerful enough to overcome obstacles or quickly leave dangerous places.
Sameh Tawfiq, Head of Research
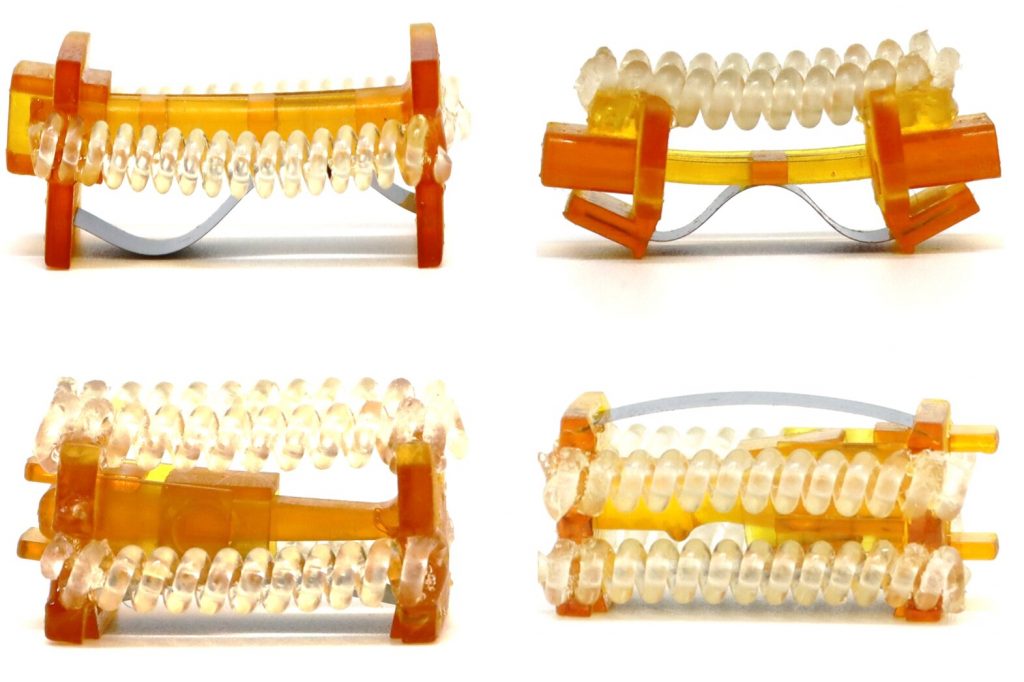 Variants of designs of jumping robots proposed by researchers. Image: University of Illinois Urbana-Champaign
Variants of designs of jumping robots proposed by researchers. Image: University of Illinois Urbana-Champaign
Scientists believe that tiny robots willto get into hard-to-reach places to help perform maintenance on large machines such as turbines and jet engines, or in agriculture to inspect plants, such as taking pictures to identify problems.
Read more:
A giant sunspot is turning towards the Earth. It is visible to the naked eye
See how a bladeless plane flies. Its speed exceeds 900 km/h
The Milky Way is abnormally large for its galactic filament
On the cover: an artistic illustration of the idea. Image: Michael Vincent, University of Illinois Urbana-Champaign