Google has conducted research and set up algorithms that will speed up and simplify the process
What did
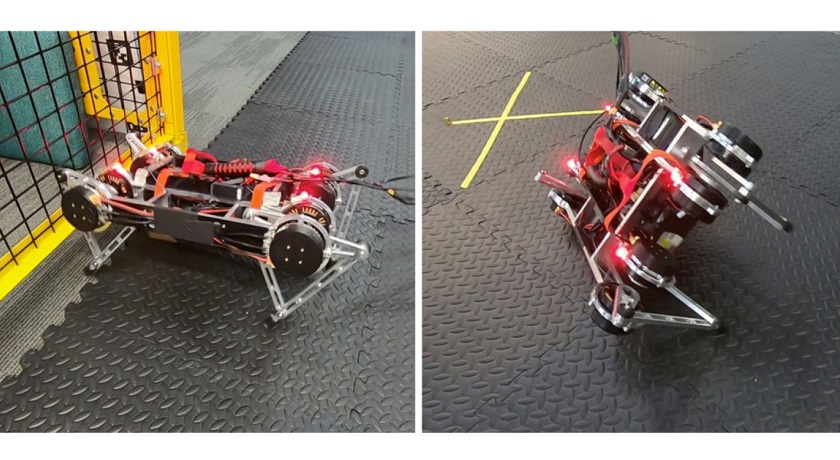
Researchers at Google Robotics have createda four-legged robot that, within a few hours, learned to walk back and forth and turn on its own. Previously, algorithms were tested on a virtual robot in a virtual environment, which helped prevent damage to the real robot. But the process of emulating different surfaces was too labor-intensive.
</ img>
Researchers have begun real-world training andthe robot was able to quickly adapt to uneven terrain. However, human intervention was still necessary and researchers had to intervene in human learning. So they limited the surface area and forced the robot to learn multiple maneuvers at once. If the robot, having reached the edge of its territory, walks forward, it will realize that there is an obstacle ahead and will begin to walk backward, acquiring a new skill.
With this system, the robot was able to use trial and error to eventually learn how to move on its own across different surfaces.
However, the study has limitations:The technology is not yet universal and suitable for all types of robots. But the researchers hope to adapt the new algorithms to different robots. If they succeed, it could greatly advance robotics.