The learning method proposed by roboticists allows the robot to autonomously learn to perform swimming maneuvers.
“In our study we presenteda biological reinforcement learning control method for simulating the movement of underwater robots,” said Gang Chen, one of the authors of the development. “This method is based on one of our previous works on beaver movement, published in Springer Link’s Journal of Intelligent & Robotic Systems".
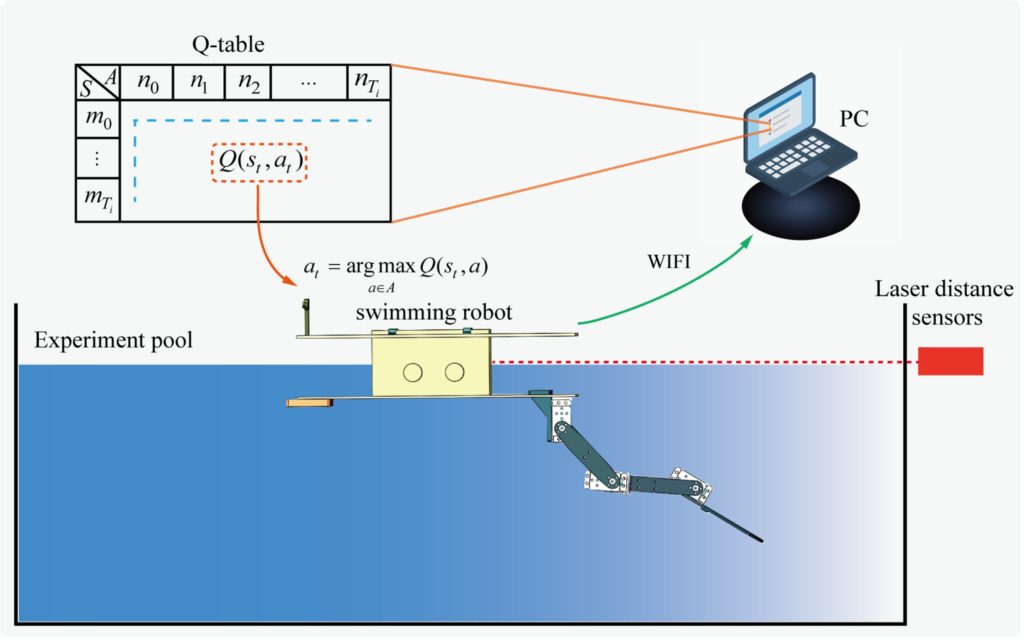 The principle of the training of the beaver robot
The principle of the training of the beaver robot
Underwater robots like the one created by Chen and hiscolleagues are non-linear systems, and their motions involve complex hydrodynamics. Thus, accurately modeling their motion can be a very complex task requiring significant computational resources.
Unlike other submarine control modelsThe robotic approach developed by Chen and colleagues does not require the integration of complex motion models based on fluid dynamics. This is due to the fact that it is based on a simplification of the ideas about the work of the joints responsible for swimming in beavers. This makes it easier to train the model and also reduces the inefficient movements of the robot during training.
“By combining reinforcement learning withmechanisms underlying the swimming behavior of beavers, our method implements robot control over swimming as quickly and efficiently as possible,” Chen explained. “The most notable benefit is that it avoids creating complex motion control models and quickly implements the swimming control of a beaver-like one-legged robot.”
Read more
American satellite "saw" an unusual message from Earth
Published video from the rocket, which was launched from an experimental accelerator
The monster at the center of our Galaxy: look at the photo of a black hole in the Milky Way