Professor Edward Anderson from the Massachusetts Institute of Technology and his graduate student Sandra Liu
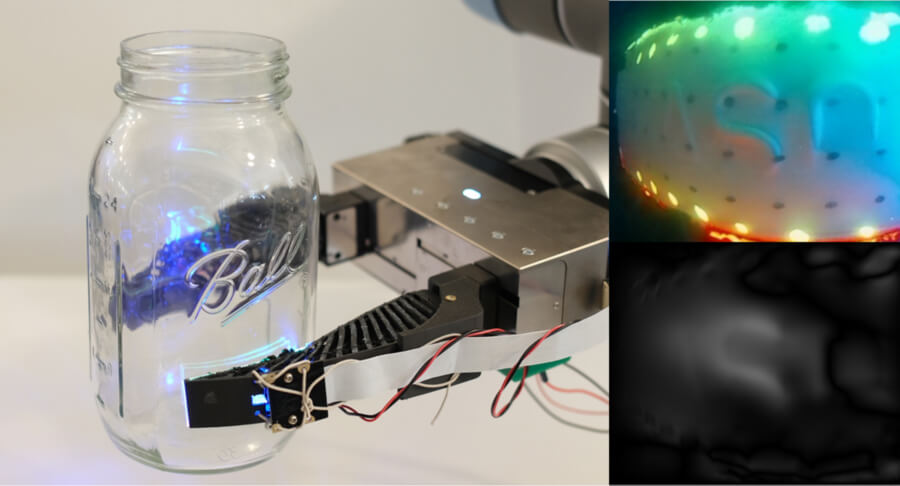
The grip consists of two flexible ribbed fingers,which adapt to the shape of the object they are in contact with. These fingers, like in many similar developments, are made of flexible plastic materials on a 3D printer. However, in their robot, the engineers removed the transverse ribs located on the inside of the fingers and giving them rigidity. Instead, the researchers installed a camera and sensors.
A thinan acrylic sheet to which “sensitive” silicone gel pads are attached. A camera is placed deep in the cavity, directed towards the acrylic layer, and the entire cavity is illuminated by LEDs.
When touching an object, the finger gently wraps aroundit, merging with the contours of the object. The camera and special algorithms analyze the change in silicone and acrylic sheets. Based on the analysis, the robot determines the general shape of the object, surface irregularities, the orientation of the object in space, and the force with which it is necessary to compress the object.
The researchers tested theircapture by making only one of the two fingers touch. The device they created successfully manipulated various objects, such as a mini screwdriver, a plastic strawberry, a tube of paint, and a glass of wine. At the same time, when capturing strawberries, the internal sensor was able to successfully detect the graininess of its surface, and when working with a jar, it could read the engraved name.
 Source: MIT Computer Science and Artificial Intelligence Laboratory
Source: MIT Computer Science and Artificial Intelligence Laboratory
As the authors of the work note, glass objectsrepresent a challenge for computer vision sensors due to light refraction. Tactile sensors allow you to bypass this limitation. When the grip lifted the glass, he felt the orientation of the stem in space and could make sure that the glass was pointing up before lowering it to the table.
Engineers note that creating a cavity insidefinger slightly disturbed the stability of the grip. Scientists plan to refine the design of their device to correct this shortcoming. In addition, they plan to develop a three-finger grip that can, for example, pick up pieces of fruit and evaluate their maturity.
Read more:
MIT builds stationary heat engine that outperforms turbines
After ten years of work, scientists questioned the standard model of physics
See what sunrise looks like on Mars