What are soft robots?
Soft robotics is a specific branch of robotics that deals with
Soft robotics largely depends onhow living organisms move and adapt to their environment. Unlike robots built from rigid materials, soft robots provide increased flexibility and adaptability to perform tasks, as well as increased safety when working with people. These characteristics allow it to be used in medicine and industry.
Soft robotics mainly designsrobots made entirely of soft materials. As a result, the resulting robots look like invertebrates such as worms or octopuses. Simulating the movement of such robots is a difficult task. The fact is that for such processes it is necessary to apply the methods of continuum mechanics. This is why soft robots are sometimes called continuum robots.
Let us recall, continuum mechanics - sectionmechanics, continuum physics and condensed matter physics, devoted to the movement of gaseous, liquid and deformable solids, as well as force interactions in such bodies.
Hybrids of soft and hard robots
To study biological phenomena, scientists create soft robots in the image of living organisms and conduct experiments that are difficult to perform on real organisms.
However, there are rigid robots that are also capable of continuous deformation, such as the snake robot.
Soft constructions can be used as part oflarger rigid robot. Robot soft effectors for gripping and manipulating objects provide an advantage. The point is that they do not destroy fragile objects.
It is also possible to create hybrid soft-hardrobots that have an internal rigid frame and external soft elements. Soft elements can have many functions: both acting mechanisms similar to animal muscles and cushioning material to ensure safety in a collision with humans.
 A wheeled robot with soft legs and the ability to move on the ground.
A wheeled robot with soft legs and the ability to move on the ground.
Photo: Ali Sadeghi, Alessio Mondini, Emanuela Del Dottore, Anand Kumar Mishra and Barbara Mazzolai
Soft robots can be bent into any shapeform. They are made of very soft material, including nanomaterials. This makes them more like human body parts, such as muscles. In fact, you could say that these robots are almost coming to life with the help of nanomaterials.
Despite a lot of research in the field of soft robots, engineers are still at the very beginning of their journey. However, experts predict that by 2024 their market will reach $2.16 billion.
How are soft robots different from ordinary robots?
Metal robots are much more limited. They were built with speed and precision in mind, making them ideal for things like assembly line work. But they are not all that universal.
Soft robots are different from industrial orcollaborative robots in that their construction is made of soft, pliable materials. Their design is very different from any other form of robots, and similarly soft robots perform very different functions.
Most soft robots are still inin the early stages of development, and the very first soft robot was developed in 2011 by Harvard professor George Whitesides. Since then, the number and types of soft robots have increased dramatically. Although they may be several years away from their actual commercial viability, they still represent an exciting technology with great potential.
Soft robots - an exciting innovation in the worldrobotics. The above five types of soft robots may have the greatest commercial potential of all types of soft robots currently being developed.
Unlike industrial or collaborative robots, soft robots serve a wide variety of applications.
How are soft robots used?
The appeal of soft robots lies in their flexibility and versatility.
6 promising types of soft robots
There are many different types of soft robots, but there are 6 different applications that promise the greatest commercial potential.
- Robotic muscles: several types are currently being developedsoft robots that will act as robotic muscles. One of the most promising prototypes takes inspiration from origami. Its folded structure can lift 1,000 times its own weight and scales from a few millimeters to a meter in length. In addition, scientists are now working on creating nanoscale robots from DNA.
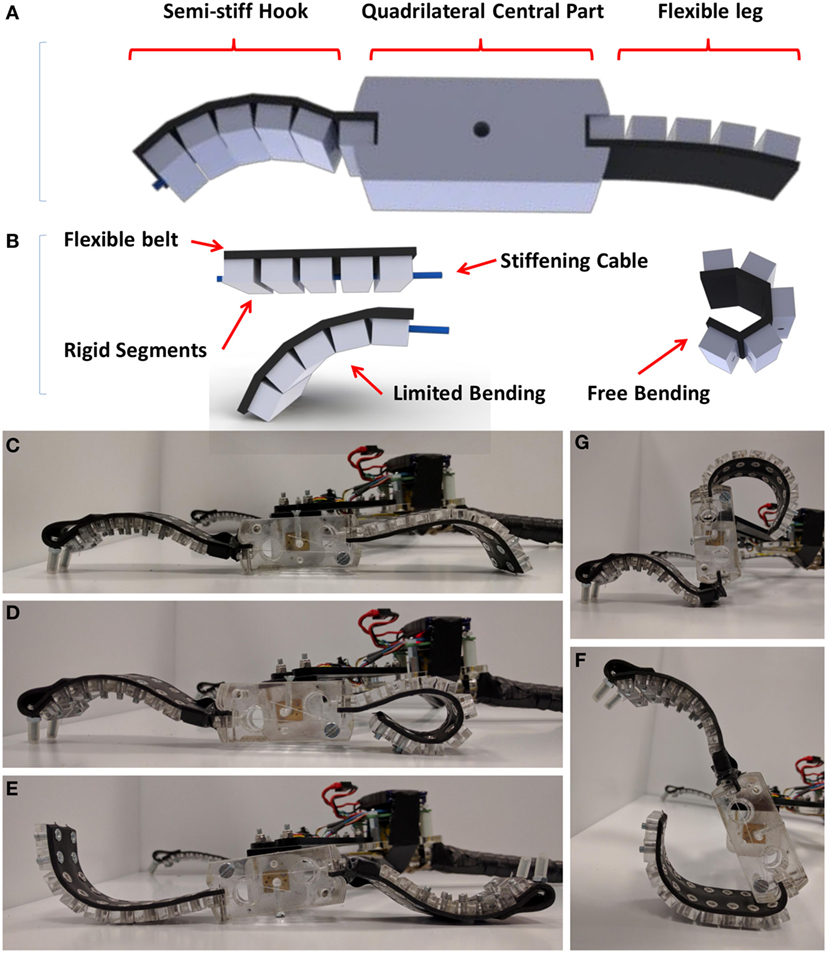
- Climbing robots:these types of robots have many potentialapplications ranging from building inspection and maintenance to search and rescue operations. One version of the soft climbing robots has a curved design very similar to a caterpillar. This allows him to crawl up and down structures of different sizes.
- Edible robots. The first project of such robots created by the school team in Philadelphia for the annual Soft Robotics competition. These biodegradable robots can safely deliver medicines to various parts of the body.
- Wearable robots.These biomimetic devices can helpa patient undergoing physical rehabilitation. The soft robot mimics the body's natural movement wherever it is, helping the patient regain normal motor function.
- Prosthetic robots.Soft robots can be used to createsuperior prosthetics for people who are missing limbs or body parts. Often, soft robotics technology is used at the end of a prosthetic hand to more delicately and precisely grasp objects.
- Astronaut robots. NASA scientists suggest that one day they will fly on the surface of Mars. Others are already designing robots that will work in the most difficult to reach parts of the human body.
Although soft robots can also be used inindustrial environments - especially as collaborative robots (also known as "cobots") working with humans, they are hardly limited to that.
The world's first soft autonomous robot
In 2016, scientists from Harvard usedliquid silicone rubber for the development of Octobot, the world's first soft autonomous robot. Inspired by octopuses, these soft robots can spin and overcome obstacles that might not be possible for sharp, rigid metal robots like those depicted in "The Terminator" or "Star Wars."
Surprisingly, Octobot is cheaper to manufacture,than a latte, and it only costs 5 cents to refuel it. One can imagine hundreds of cheap soft robots being sent to investigate the scene, overcome obstacles and bottlenecks to aid in the rescue operation.
“The main goal of soft robotics is not to createultra-precise machines, because we already have them, '' said biomedical engineer Jada Gerboni in her 2018 TED talk. "And to make robots able to withstand unexpected situations in the real world."
Soft robots in medicine
Soft robots can be used assurgical and medical instruments (in particular endoscopes). Their advantage is that they move through body structures more easily than traditional instruments can. This gives doctors a clearer picture of the area of the patient's body that they want to examine.
Fully soft robotic clothing that can help people move around is one step closer to reality with the development of a new flexible and lightweight power system for soft robotics.
Discovery made by a team from BristolUniversity, could pave the way for wearable assistive devices for people with disabilities and those suffering from age-related muscle degeneration. The study was published today inScience Robotics.
 New slim and lightweight credit card sized pump. Credit: Tim Helps, University of Bristol.
New slim and lightweight credit card sized pump. Credit: Tim Helps, University of Bristol.
Soft robots are made of pliable materials,which can stretch and twist. These materials can be used to make artificial muscles that contract when air is pumped into them. The softness of these muscles allows for the use of supportive clothing. However, until now, these pneumatic artificial muscles have been driven by conventional electromagnetic (motor-driven) pumps, which are bulky, noisy, complex and expensive.
Researchers at Bristol SoftLaband the Bristol Robotics Laboratory, led by Robotics Professor Jonathan Rossiter, have successfully demonstrated a new electro-pneumatic pump that is soft, flexible, inexpensive and easy to manufacture.
In the article, the team describes how the new softA credit card-sized pump can drive artificial muscles with an air bladder and pump fluids. The team is also outlining their next steps to make powerful clothing a reality.
Likewise, carbon-based titanium polymerscan be used in combination with synthetic polymers to create ultra-thin artificial muscles. The technology has been showcased in art reproductions of dancing butterflies, fluttering leaves and blooming flowers at the Korea Advanced Institute of Science and Technology.
How do soft robots work?
Soft robots specially designed forimitations of life, must often be subjected to cyclic stress when moving or performing any other task. For example, in the case of the lamprey or cuttlefish-like robot described above, it would require electrolysis of water and ignition of gas to move, resulting in rapid expansion to propel the robot forward. This repetitive and explosive expansion and contraction will create an intense cyclic load on the selected polymer material. A robot underwater in Europa would be nearly impossible to repair or replace, so care must be taken to select a material and design that minimizes the occurrence and propagation of fatigue cracks. In particular, a material should be chosen with an endurance limit or a stress amplitude frequency above which the fatigue characteristic of the polymer is no longer dependent on frequency.
Since soft robots are made of softmaterials, temperature effects must be taken into account. The yield stress of the material tends to decrease with temperature, and in polymeric materials this effect is even more pronounced. At room and higher temperatures, long chains in many polymers can stretch and slide along each other, preventing local stress concentration in one area and making the material plastic. But most polymers undergo a ductile-to-brittle transition temperature below which there is not enough thermal energy for long chains to react in this ductile fashion, and destruction is much more likely. The tendency for polymeric materials to become brittle at lower temperatures is believed to be the cause of the Challenger shuttle disaster and should be taken very seriously, especially for soft robots that will be introduced into medicine. The ductile to brittle transition temperature does not have to be what can be considered "cold" and is in fact a characteristic of the material itself, depending on its crystallinity, toughness, side group size (in the case of polymers) and other factors.
Disadvantages of technology
Soft robots are not without their drawbacks.Specifically, the scientists discovered that fluid actuators—the devices that actually animate robots—are slow to turn on due to the sheer amount of fluid required for movement, or because their flow is slowed by various structures within the device (such as tubes and valves). .
However, Harvard researchers are developingworkaround. Noting that the bending of such toys releases a lot of energy, they design actuators with two slide-out covers, one inside the other. When the outer cap is inflated, the pressure increases on the inner cap. When it bends, the release of energy sets the device in motion.
Soft robots have potential thatextends to Mars and back, and they will no doubt become a large part of society in the coming years. Their capabilities are limited only by the human imagination.
Soft robots and humans
Soft-body robots offer the opportunity forsocial and tactile interactions between humans and robots, which require careful consideration of the possibility of inappropriate emotional attachments, as well as personal and socially destructive behavior of users. Ethical issues related to human-robot interaction and how they should contribute to the design of soft robotics in the context of social interaction are discussed in an article for the journal Soft Robotics.
Thomas Arnold and Matthias Schoitz, Tufts University,Medford, Massachusetts, co-authored an article entitled "The Tactile Ethics of Soft Robotics: Intelligent Design for Human-Robot Interaction." They explore a wide range of topics, including the ability of soft robots to touch and interact with their environment, the potential risks of forming one-way human emotional connections with robots, and what social robots should be designed for. To illustrate some of the ethical issues associated with soft robotics and the potential risks to society, the authors discuss the example of sex robots.
Arnold and Schoitz suggest three commonthe principle of developing soft robotics in the context of a social person and a robot. They encourage the soft robotics community to address these ethical issues as a way to improve the quality and efficiency of human-robot interaction. “Soft robot technology will soon bring us machines that directly interact with humans; it is important that we start thinking about the impact they can have on social situations. This paper outlines some of the major challenges and provides excellent guidance for serious discussion of the human-robot relationship, ”concludes Barry A. Trimmer, Ph.D., who runs the Laboratory of Neuromechanics and Biomimetic Devices at Tufts University in Medford, Massachusetts.
Read also
The first accurate map of the world was created. What's wrong with everyone else?
Look at Hubble photos of planetary nebulae.
Physicists have created an analogue of a black hole and confirmed Hawking's theory. Where it leads?