Ingenjörer från University of Cambridge har utvecklat en mjuk robothand tryckt på
Forskarna använde trycktaEn antropomorf hand implanterad med taktila sensorer i en 3D-skrivare så att handen kan "känna" vad den rör vid. Handen var endast kapabel till passiv rörelse baserat på handleden. "Den stora fördelen med denna design är rörelseomfånget som vi kan få utan att använda några ställdon", säger författarna.
Träning av en "passiv" robotarm. Video: University of Cambridge
Forskare genomförde mer än 1 200 tester med en robotarm,tittar på hennes förmåga att ta tag i små föremål utan att tappa dem. Inledningsvis tränades roboten med små 3D-tryckta plastkulor och tog tag i dem med förutbestämda handlingar som härrörde från mänskliga demonstrationer.
Roboten använde trial and error för attta reda på vilken fångst som kommer att bli framgångsrik. Efter att ha avslutat sin bollträning försökte han ta tag i olika föremål, inklusive en persika, en datormus och en rulle bubbelplast. I dessa tester lyckades handen greppa 11 av 14 föremål.
Fånga föremål av olika storlekar, former och texturer- en uppgift som är enkel för en person, men svår för en robot. De flesta av dagens avancerade robotar är inte kapabla att utföra manipulativa uppgifter som små barn lätt kan hantera. Till exempel vet människor instinktivt hur mycket kraft de ska använda för att lyfta ett ägg, men för en robot är detta ett problem: inte tillräckligt stark kommer att få föremålet att falla, för stark kommer att bryta ägget.
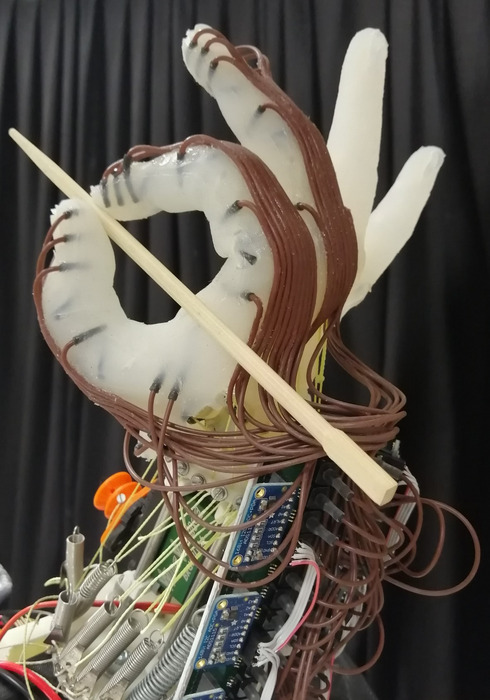 Prototyp robotgripare. Bild: University of Cambridge
Prototyp robotgripare. Bild: University of Cambridge
Sofistikerad teknik med motoriserade fingrarkräver en betydande mängd energi och ett stort antal komplexa och dyra ställdon för varje led. Det passiva greppet som ingenjörerna föreslår gör roboten mycket lättare att kontrollera och mycket mer energieffektiv. Forskarna tror att deras anpassningsbara design kan användas för att utveckla billiga robotar som klarar mer naturliga rörelser.
Läs mer:
Titta på kartan över Mars med högsta upplösning: 110 000 bildrutor och 5,7 biljoner pixlar
"Hav" av kvarkar inuti en proton: vad består en elementarpartikel av
Ny bild av Hubble förbryllade forskare
På omslaget: en prototyp av robotgripare. Bild: University of Cambridge