Forskare från italienska tekniska högskolan har presenterat en prototyp av en trebent robot som
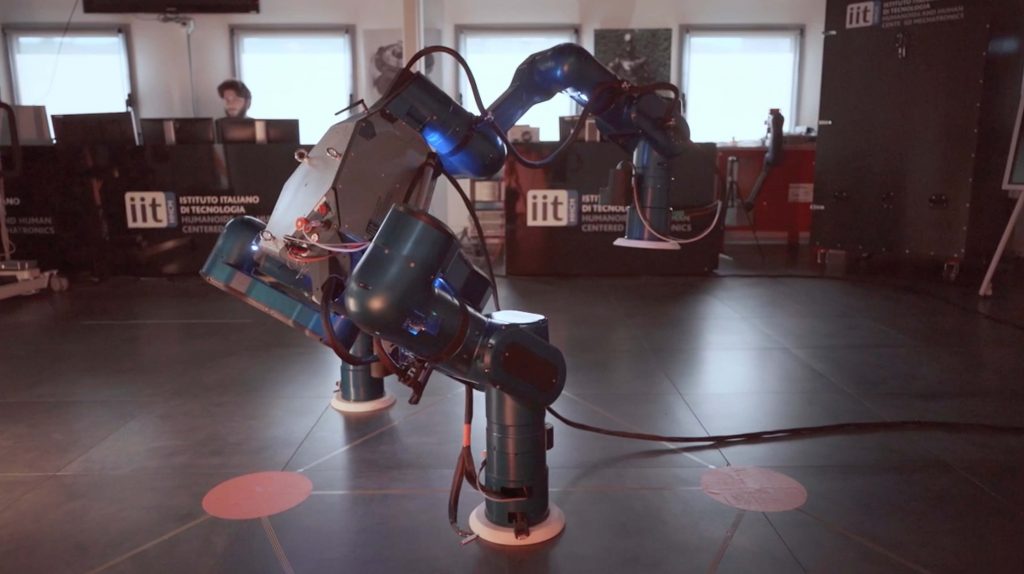
MARM robotplattformen består avcentralkropp, tre lemmar och en speciell dockningsanordning. Den senare används för att ladda enheten och utbyta data. När man skapar en robot har forskare tillhandahållit möjligheten att arbeta både i närvaro av gravitation och i mikrogravitation.
Robot MARM. Video: IIT
MARM-roboten kan använda tre lemmar för attrörelse genom att ta tag i standardkopplingar på stationsytor och krypa över dem. Den kan också montera och placera olika enhetskomponenter, som att flytta och installera de 1,2 m breda modulära sexkantiga plattorna som används på ISS, och manipulera orbitala plug-ins.

Robot MARM. Foton: IIT
Tre extremitetskonfigurationer - grundläggandeskillnaden mellan den nya roboten och tidigare utvecklingar. Detta, enligt ingenjörer, ger större flexibilitet i driften av enheten. Han kan till exempel använda två "händer" för att arbeta, hålla i ytan med hjälp av den återstående.
Forskare föreslår att man använder MARM för atthämta varor från lagret, flytta dem till rätt plats, hämta och placera dem. Prototypen kommer att testas i mikrogravitation med detta scenario i åtanke, varefter en fungerande version kommer att skapas för att skickas till ISS.
Läs mer:
Forskare från permafrostzonen: hur de utvecklar smarta kläder och ett cancervaccin
Två planeter har hittats inte långt från jorden. Kanske är de bebodda
Forskare har tagit reda på vem som gynnades av dinosauriernas död