Ingenjörer från École Polytechnique Fédérale de Lausanne har utvecklat en metod som gör att en robot kan
Ornithopter landning. Video: EPFL
Att landa en fågel på en gren verkar vara en av de mestnaturliga processer. Men i själva verket kräver det en extremt exakt balans mellan tid, slagkraft, hastighet och rörelsenoggrannhet, konstaterar författarna till utvecklingen. Inte överraskande, tills nu har ingenjörer inte kunnat reproducera dessa rörelser i robotar.
 Ornithopter landningssystem. Bild: Raphael Zufferey et al., Nature Communications
Ornithopter landningssystem. Bild: Raphael Zufferey et al., Nature Communications
Forskare har löst problemet med exakt balansutrusta ornithoptern med en inbyggd dator och navigationssystem. Den använder externa källor för att fånga rörelse och bestämma enhetens position. Ornithopterns klobens bihang var exakt kalibrerat för att kompensera för upp-och-ned vibrationer under flygning när drönaren försökte ta tag i en sittpinne.

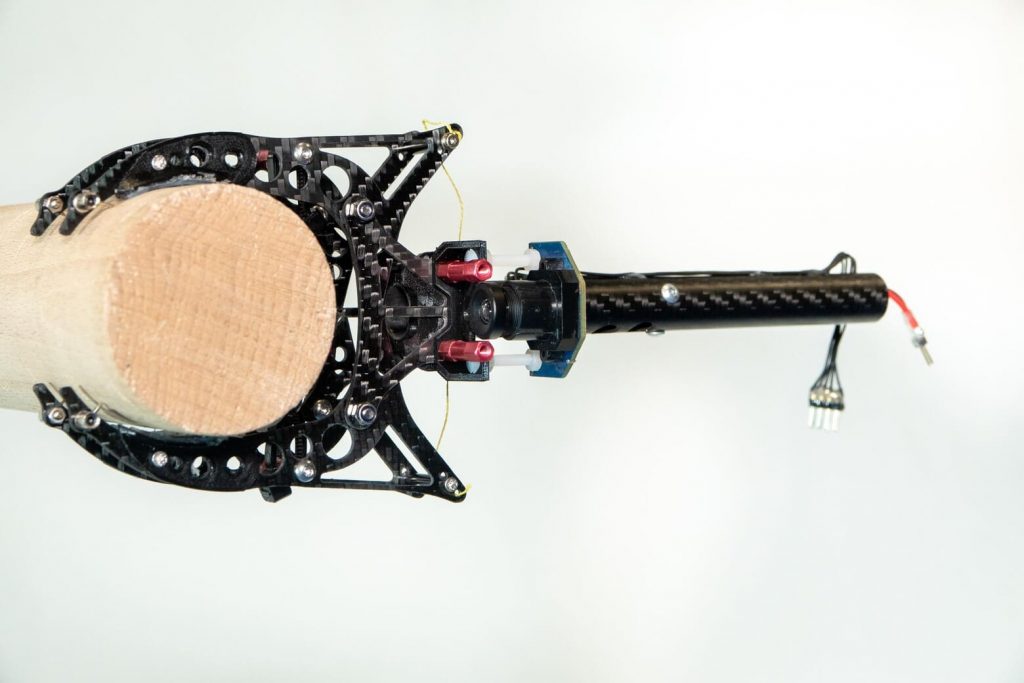
Ornithopterfäste. Bild: EPFL
Själva klon var utformad på ett sådant sätt attabsorbera impulsen från robotens rörelse vid en kollision och stäng snabbt och säkert för att stödja dess vikt. Väl på abborren stannar roboten på abborren utan att förbruka energi. Forskarna genomför för närvarande flygtester i labbet.
När ornithoptern lär sig på egen handlanda på en trädgren kommer den att kunna utföra vissa uppgifter, som att diskret samla in biologiska prover eller göra mätningar från trädet. Så småningom kan det till och med landa på konstgjorda strukturer, vilket kan öppna upp för nya användningsområden.
Raphael Zufferey, medförfattare till utvecklingen
Läs mer:
Två planeter har hittats inte långt från jorden. Kanske är de bebodda
En unik meteor skrev om solsystemets historia: var kom den ifrån
Prototypmodulen för den nya ISS sprängdes i NASAs centrum. Titta hur det var