Att utöka kapaciteten hos autonoma obemannade flygfarkoster (UAV), forskare och ingenjörer
Modellen heter Agilicious, och forskarnahävdar att det kan göra quadcoptrar mer kapabla att navigera över hinder och spåra banor även i höga hastigheter under sina resor. Dessutom är modellen användbar både i verkliga flygningar och i virtuella simuleringar.
"Genom öppen källkod Agilicious tillhandahåller viforsknings- och industrisamhällets tillgång till en mycket flexibel, mångsidig och utbyggbar quadcopter-plattform”, sa forskarna.
Källa:
Vetenskaplig robotik
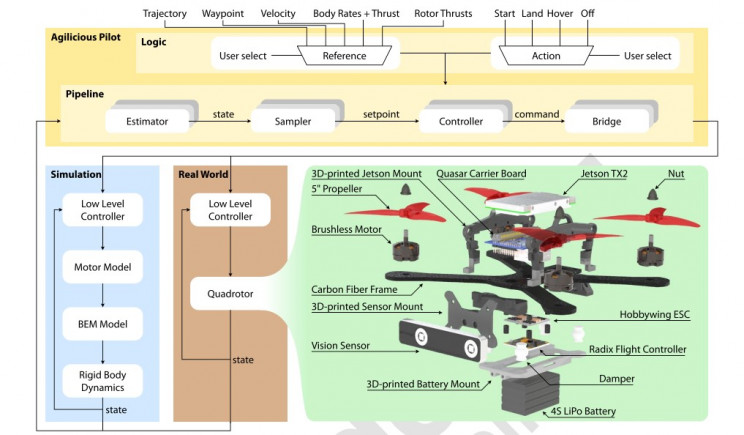
I sin Agilicious-plattform använde deavancerade visionsensorer ombord, flygövervakningssystem och andra komponenter. De förbättrade i slutändan drönarens realtidsuppfattning, spårning av banor och färdigheter i flygplanering.
Dessutom är plattformen även utrustad med NVIDIAJetson TX2, en kraftfull och energibesparande artificiell intelligensmodul som utför komplexa beräkningsuppgifter för att stödja sina hårdvarufunktioner.
Läs mer:
Den unga stjärnan "gömde" något som förändrade forskarnas syn på universum. Huvudsaken
Forskare avslöjar hur vitaminer påverkar förekomsten av cancer
Ett enkelt sätt att gå ner i vikt i en dröm kommer snart att testas på frivilliga